
システム構成
| いいえ。 | 名称 | 説明 |
|---|---|---|
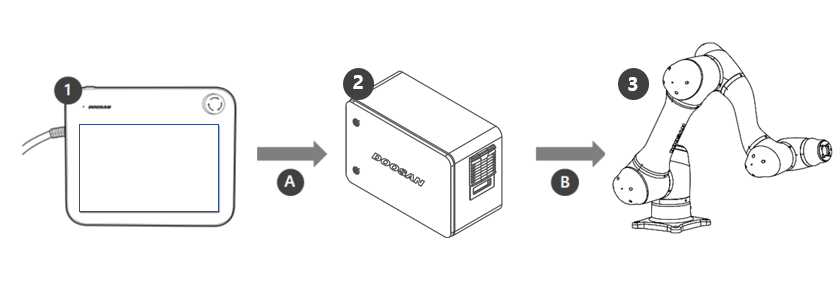
| 1 | ティーチペンダント | このデバイスはシステム全体を管理し、ロボット固有のポーズを教えたり、マニピュレータやコントローラーに関連する設定を行うことができます。 |
| 2 | コントローラ | ティーチペンダントによって設定されたポーズまたは動きに応じてロボットの動きを調整するために使用します。さまざまなI/Oポートを備えており、さまざまな種類の機器やデバイスを接続して使用できます。 |
| 3 | マニピュレータ | これは、さまざまな工具アタッチメントと一緒に使用して、オブジェクトを輸送したり、パーツを組み立てることができる産業用コラボレーションロボットです。 |
| A | コマンド/監視 | |
| B | 電源/ネットワーク |