ツール中心点
工具中心点(TCP)を構成する場合は、フランジ座標に基づく位置と回転角度も定義する必要があります。 この時点で、フランジ 座標のデフォルトの始点から Xの工具中心点(TCP)までの距離。 Y方向とZ方向は10000 mmより大きく設定できません。また、力 制御、コンプライアンス 
自動計算を使用して工具中心点(TCP)を設定した場合、 計算はX、Y、Z 位置のみに基づいて行われるため、回転角度を入力する必要があります。回転角度は 、RZ、RY、RXで定義でき 、 「オイラーZ-Y-Z」 の回転方法に基づいて定義できます。
x、y、zで表される座標軸 と 、X、Y、Zで表される座標軸の定義 は次のとおりです。
- 「フランジ座標」の座標軸 (x、y、z): フランジの端に定義された「フランジ座標」の座標軸方向は、ロボットのロボットジョイント角度 が(0,0,0,0,0)の場合のロボット座標と同じです。
- 「TCP座標」 の座標軸(X、Y、Z):これは 、フランジの端部に取り付けられている工具の端部または作業点に設定されます。 このとき、「TCP座標」の回転角度は 、「フランジ 座標」に基づいて次 の1)~ 3)の順序で定義されます。
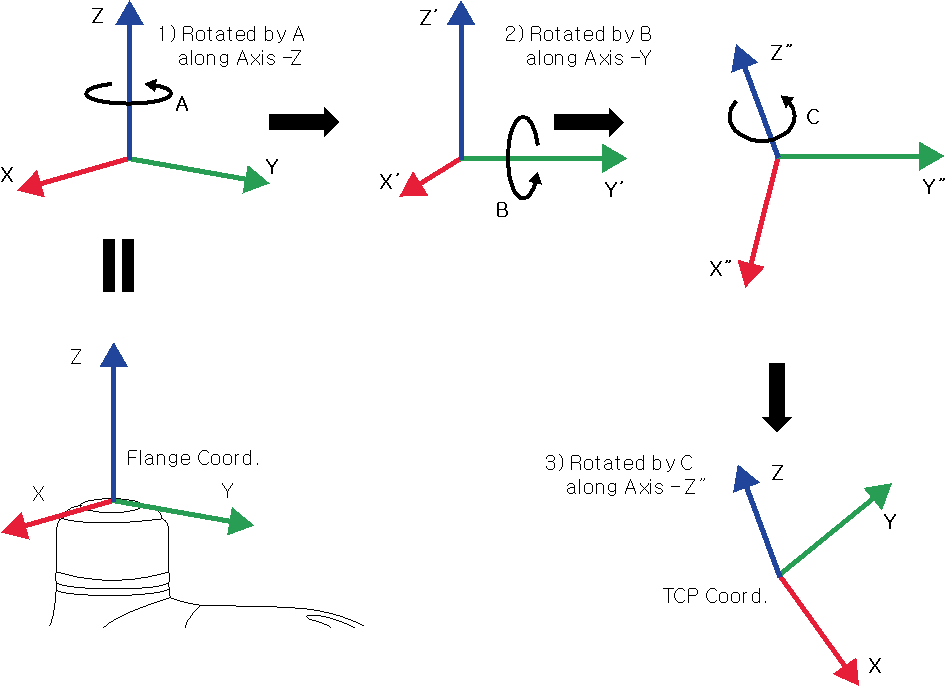
1) フランジ座標のZ軸に沿って角度を1度回転します。
2) 1に従って回転した座標のy軸に沿ってB度回転します。
3) 2に従って回転した座標のz’軸に沿ってC度を回転させます。
ここでは、上記の方法に従ってTCPを設定する例をいくつか示します。
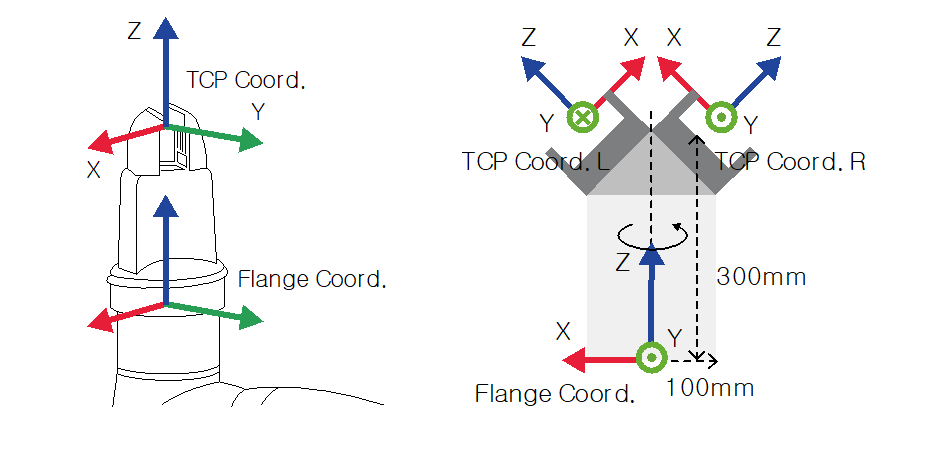
- [X、Y、Z、A、B、 C] = [0、0、100、0、0、0、 0]:Z方向オフセットのみの一般グリッパー (TCP座標)
- [X、Y、Z、A、B、 C] = [100、0、300、180、-45、 0]:45度角度の左グリッパー (TCP座標。L)
- [X、Y、Z、A、B、 C] = [-100, 0, 300, 0, -45, 0]:45度の角度を持つ右グリッパー (TCP Coord)。R)
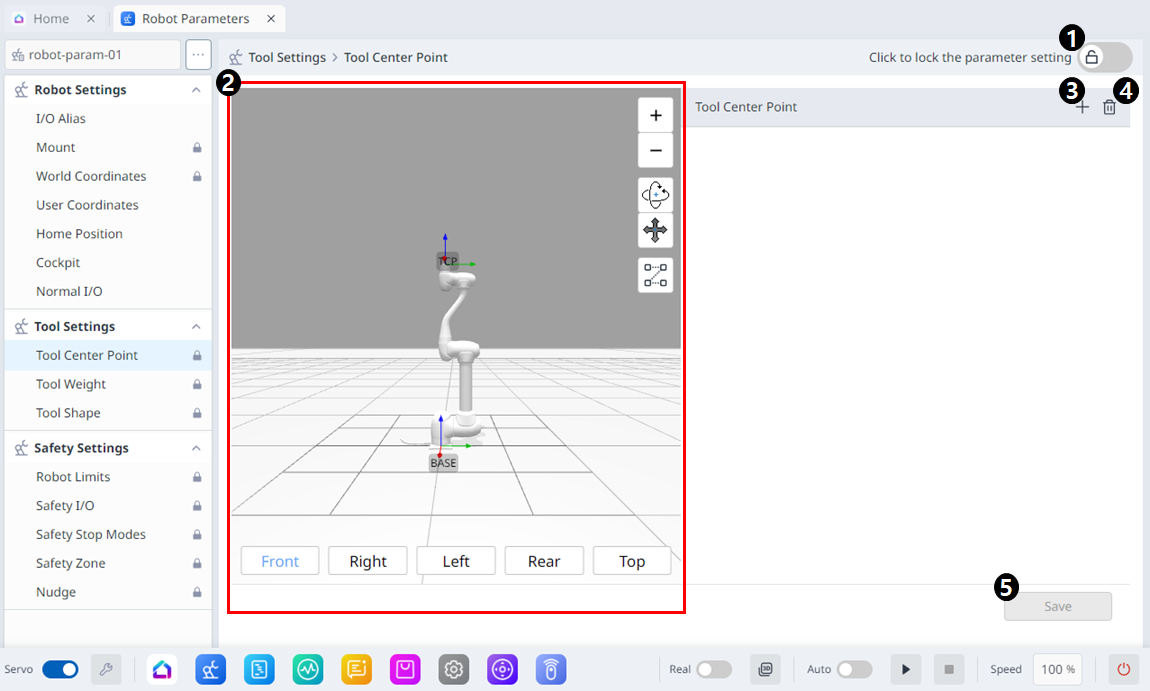
| 項目 | 説明 | |
|---|---|---|
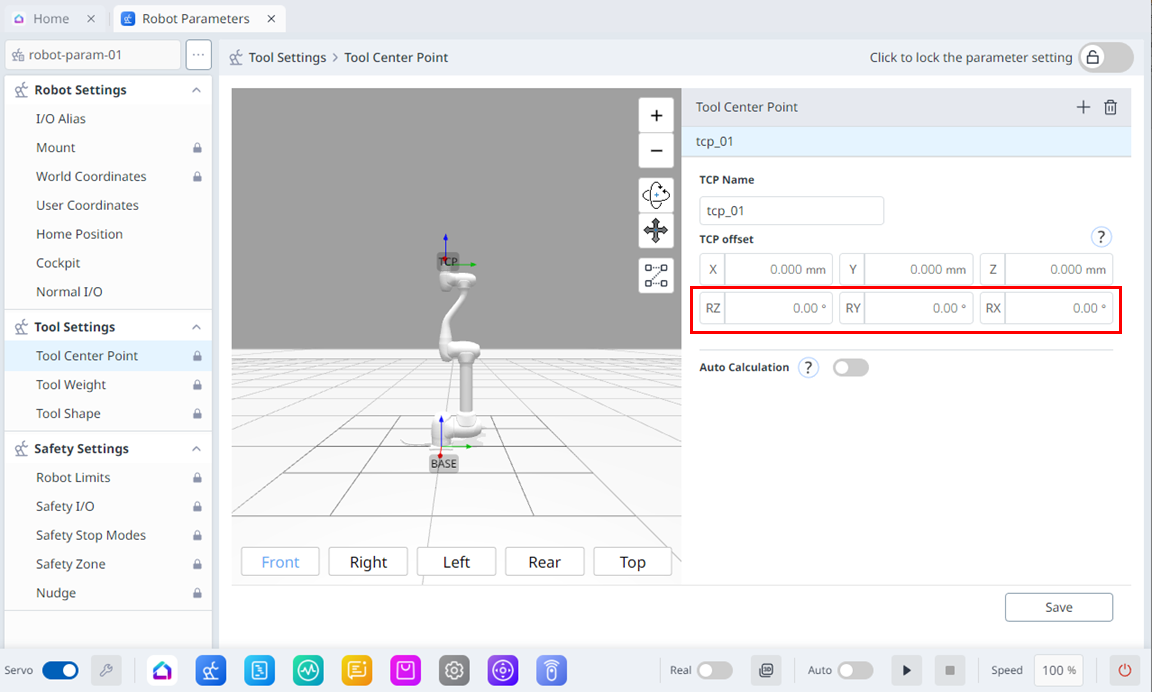
| 1 | ロック切り替えボタン | 設定値をロックするために使用します。値を変更するには、安全パスワードが必要です。 |
| 2 | 3Dシミュレーション | ここで、構成済みの工具中心点をシミュレートできます。 |
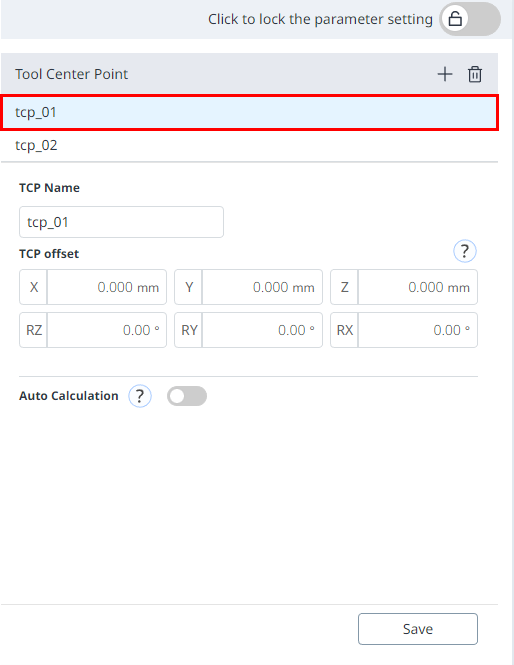
| 3 | 追加 | このボタンを使用すると、TCPを追加できます。 |
| 4 | 削除 | このボタンを使用すると、選択したTCPを削除できます。 |
| 5 | 保存 | このボタンを使用すると、設定値を保存できます。 |
設定がロックされると、以下の画面が表示されます。
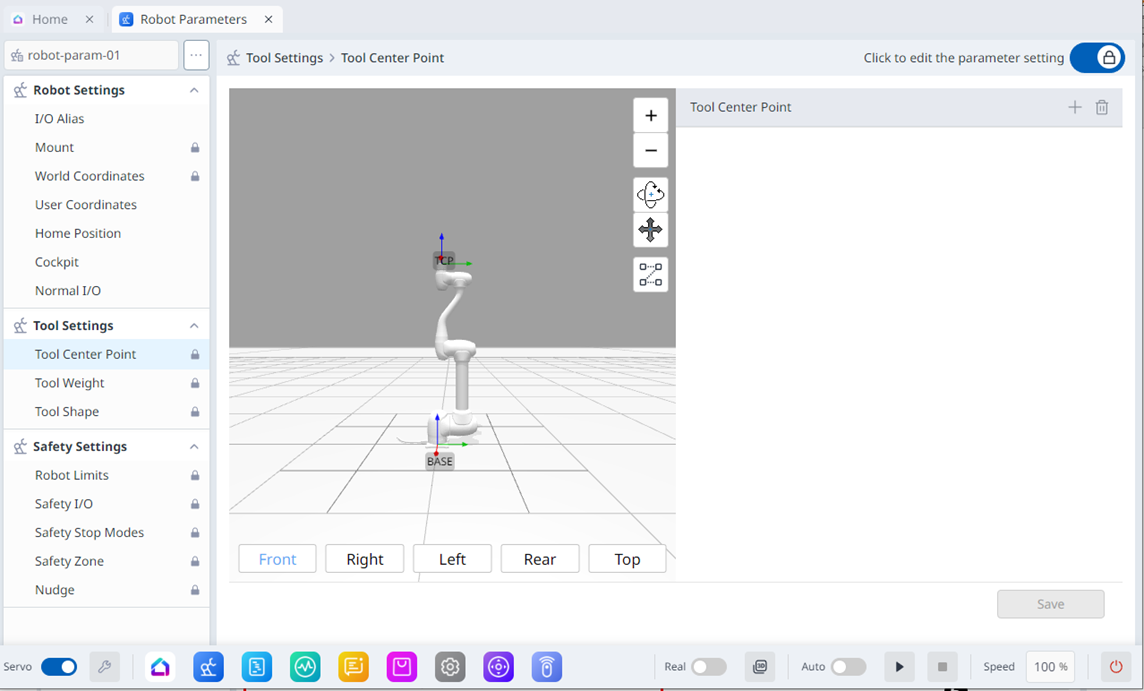
この時点で、選択したTCPは次のように青色で表示されます。