オイラー角 A 、 B 、 C とは?
オイラー角( Euler Angle )は、 X 、 Y 、および Z 軸の角度を表す方法で、オブジェクトの方向に垂直になります。A 、 B 、 C は順次回転角度を表します。各ロボットメーカーは、 Rz-Ry-Rx や Rx-Ry-Rz など、この A 、 B 、 C の回転順序を異なる方法で定義 します。
Doosan Robotics では Rz-Ry-Rz を使用 しています。ここで 、 Rz は Z 軸での回転を意味 し、 Ry は Y 軸での回転を意味します。RZ は角度 A 、角度 B として Ry 、角度 C として Rz を表すことができ、オブジェクトの現在の回転方向を示します。座標から Z 軸方向に回転すると、新しい座標に基づいて回転が行われることに注意してください。
これは、ステップ 1 ~ 4 で表示できます。
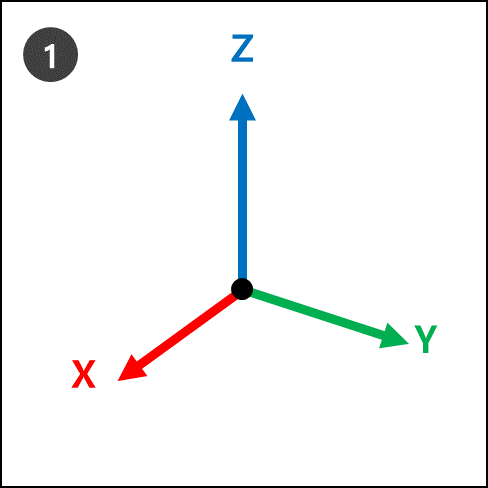
座標( X 、 Y 、 Z )があると仮定します。
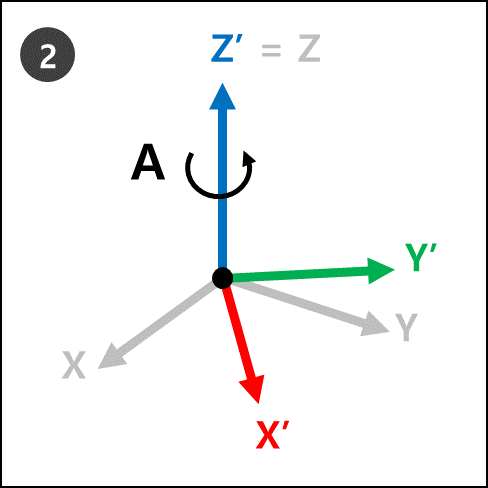
RZ :Z 軸から 1 度回転します。
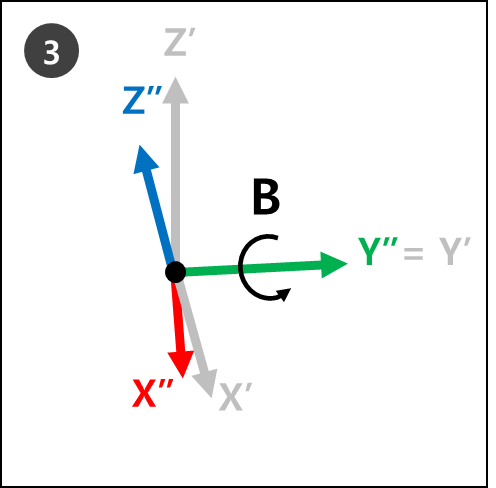
RY : 手順 2 で、新しい座標( X ’、 Y ’、 Z ’)の新しい Y 軸( Y ’)から B 度回転します。
RZ :手順 3 で、新しい座標( X ’、 Y ’、 Z ’’)の新しい Z 軸( Z ’’’)から B 度回転します。
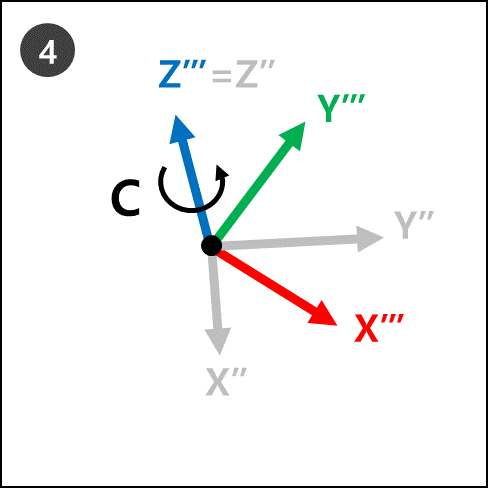
新しい座標(ステップ 4 の Z ’’、 Y ’’、 X ’’’は、オイラー角 A 、 B 、 C が適用されたときの現在のロボットの回転を示します。
これは右手で簡単に視覚化できます。右手で次のポーズをとってください。これを右手の法則と呼び、親指( X 軸)、人差し指( Y 軸)、および中指( Z 軸)を互いに垂直にすると、 X 、 Y 、 Z 軸で構成される座標が作成されます。
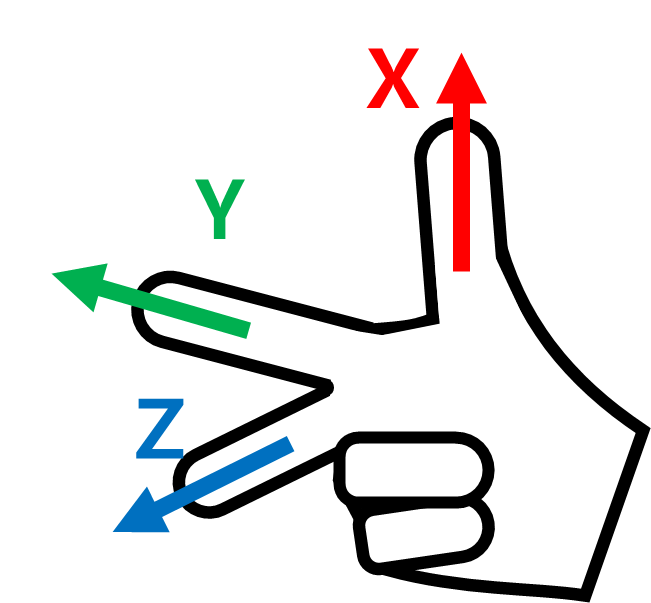
次に、右手の直交ルール( Rule Cartesian )ポーズを作成し、回転 Rz 、 Ry 、 Rz を順次にします。
RZ :中指( Z 軸)を 1 度回転させます。
RY :インデックスフィンガー( Y 軸)を B 度回転させます。
RZ :中指( Z 軸)を C 度回転させます。
注
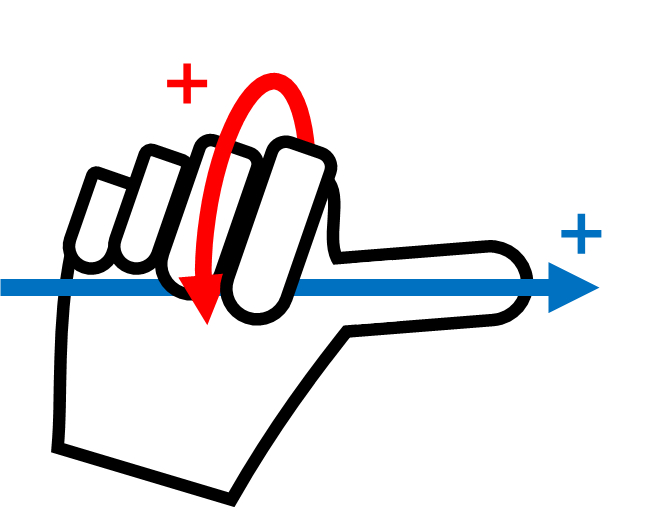
A 、 B 、 C の + 回転方向は、親指以外の 4 本の指の方向であり、親指が + 方向を指し、 4 本の指が固定されている。これは、時計回りねじの法則と呼ばれます。