
特異性とは
マルチジョイントロボットの特異点とは、移動中にロボットが次のポーズを計算するのが困難な位置(または点)を指します。マルチジョイントロボットは、ロボットの端に基づいて、移動中の各ジョイント角度を計算します
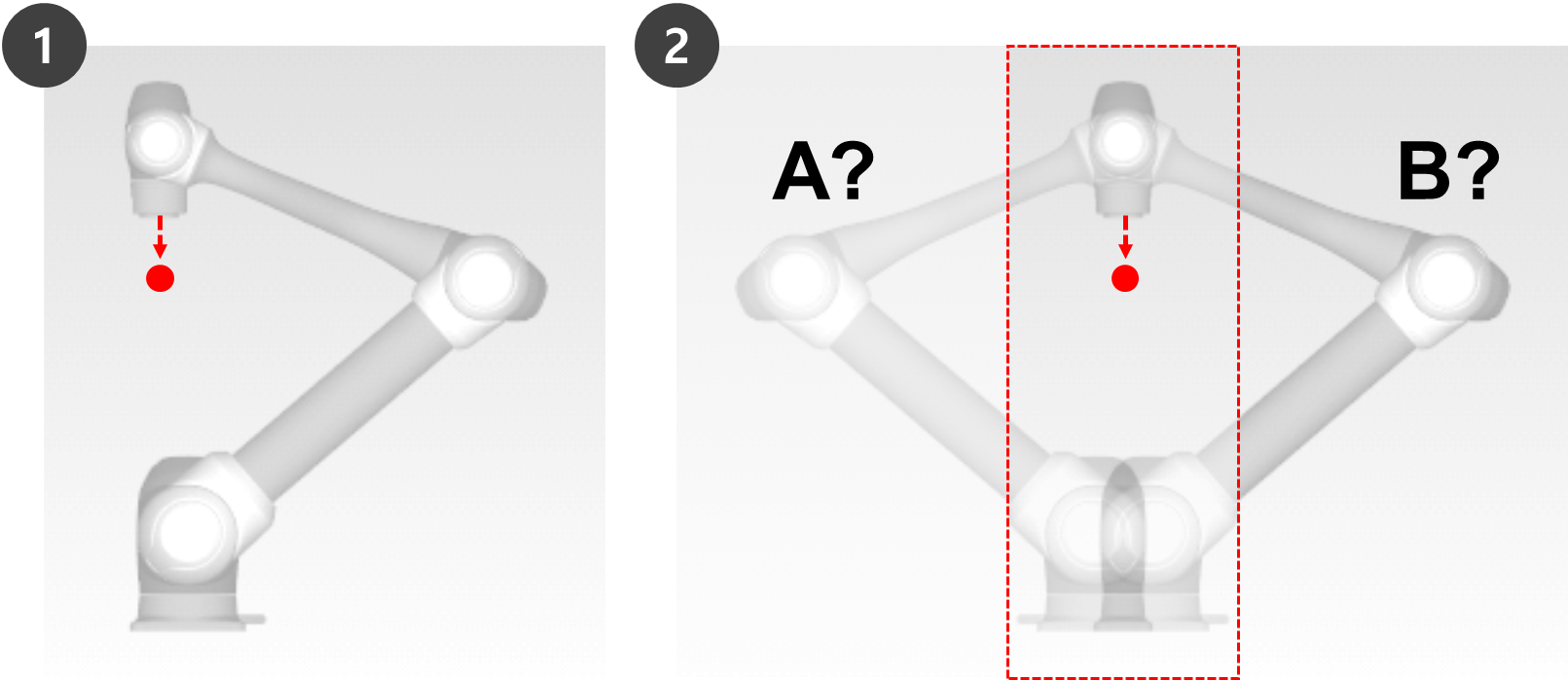
例えば、図 以下の 1 つは、ロボットが赤い点に移動している場合、図に示すように、ロボットはジョイントを移動してポーズ A またはポーズ B を設定するかどうかを判断できないことです。この位置(または点)は特異性と呼ばれます。
特異性の近くでは、平面、点、および直線に関してロボットの動作が流体ではなく、ロボットの端の線形動作が維持されない場合があり、制御中の位置エラーが増加する可能性があります。次の図に示すように、ロボットジョイントが直線を形成する場合を含め、 3 つのケースで特異性が発生します。
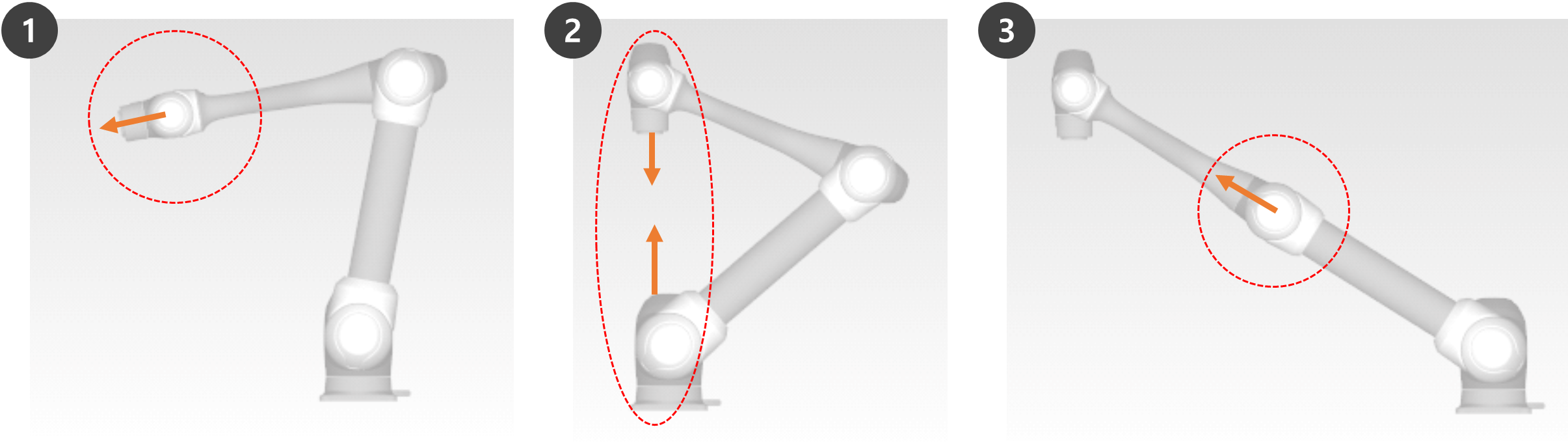
手首の特異性:ロボットの手首が軸 5 が 0 º に近づくと線を形成します
- 人間の腕と比較した場合、軸 4 、 5 、および 6 はリストジョイントに対応します。
- 肩の特異性:軸 1 と軸 6 が同じ行にある場合
- 人間の腕と比較した場合、軸 1 および 2 は肩関節に対応します。
- エルボの特異性:軸 3 が 0 º に近づくと、ロボットが直線を形成します
- ヒューマンアームと比較した場合、軸 3 はエルボに対応します。
注意
ジョイント回転を使用して移動する手動操作および自動操作は、特異性の影響を受けません。
- タスクの移動、 MoveL コマンドなど
- 特異性は、ロボットが線形移動を実行して終了する手動および自動操作中にのみ発生します。
- ジョイント移動、 MoveJ コマンドなど
- 特異性ゾーンでは、強制制御またはコンプライアンス制御は使用できません。
- 線形動作が特異点を通過すると、特定の軸の回転速度が急速に上昇するため、ジョイント速度制限違反またはジョイント角度制限違反が発生する可能性があります。
特異性を回避する方法
Doosan Robotics ロボットは、モーションコントロール中の特異点を回避するオプションを提供します。ただし、特異点ゾーンで MoveJ などのジョイント移動コマンドを使用して例外を作成しないタスクを設定することをお勧めします。