製品の紹介 (CS-04)
各部の名称と機能
DCコントローラ (CS-04)
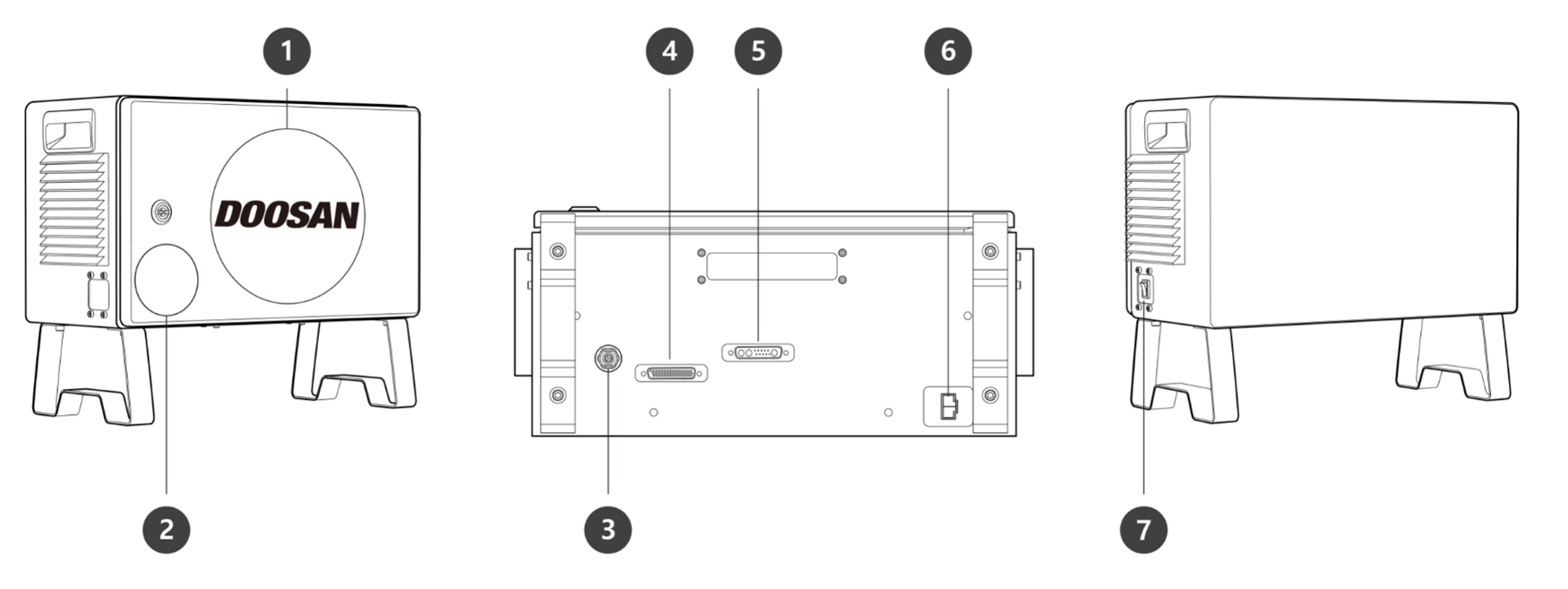
番号 | 項目 | 説明 |
1 | I/O接続端子(内部) | 別のロボットのコントローラや周辺機器とつなぐことができます。 |
2 | 非常停止ボタン 設定スイッチ | ティーチペンダント、スマートペンダント又は非常停止ボタンを使用するためには、必ずスイッチを実際の構成に合わせて設定してください。 |
3 | 非常停止ボタン及びスマートペンダントの接続端子 | 非常停止ボタン又はスマートペンダントのケーブルをコントローラとつなぎます。 |
4 | ティーチペンダントのケーブル接続端子 | ティーチペンダントのケーブルをコントローラとつなぎます。 |
5 | マニピュレーターケーブル接続端子 | マニピュレーターのケーブルをコントローラとつなぎます。 |
6 | 電源接続端子 | コントローラの電源をつなぎます。 |
7 | 電源スイッチ | コントローラの主電源を入れたり切ることができます。 |
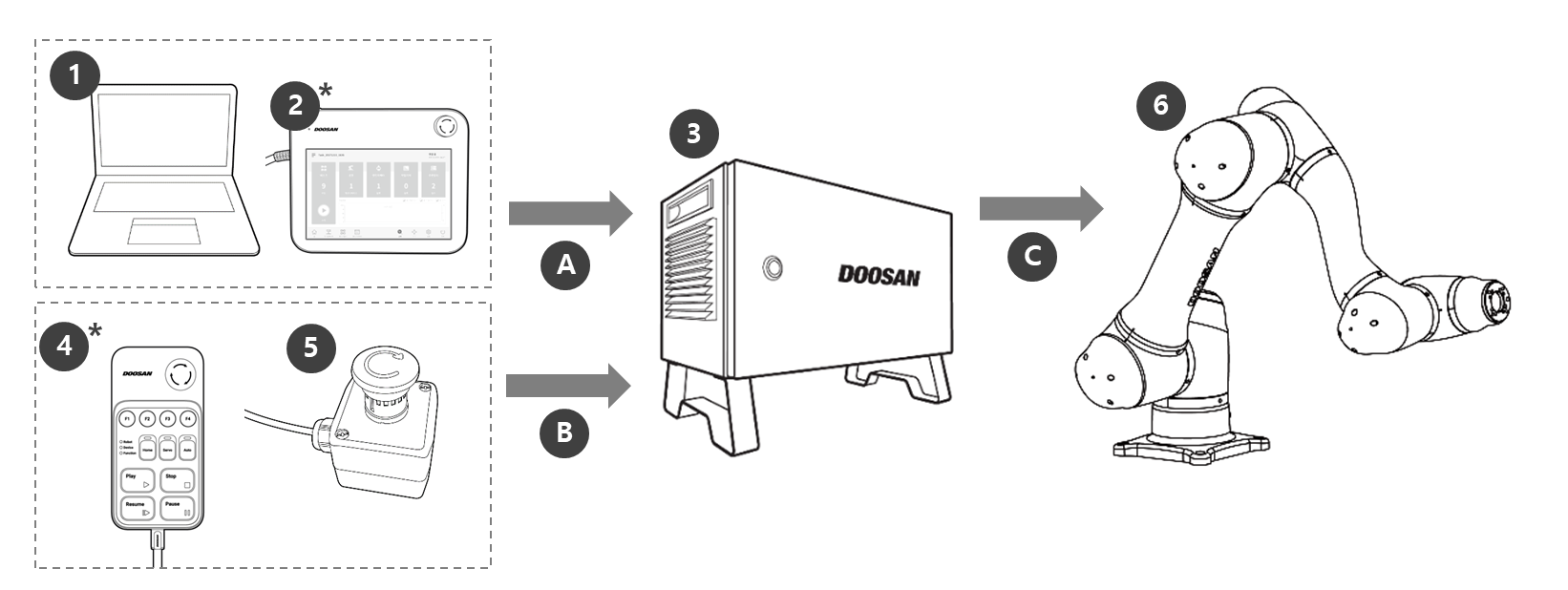
システム構成図
| 番号 | 項目 | 説明 |
|---|---|---|
| 1 | ラップトップ | DART Platformを設置した後、ティーチペンダントと同じ作業環境をつくることができます. ラップトップは構成品に含まれず、DART Platformを設置して使用する時に必要となります。 |
| 2 | ティーチペンダント** | システム全体を管理する機器で、ロボットに特定のポーズを学習させたり、ロボットとコントローラーおよびマニピュレーターに設置される関連した設定ができます。 |
| 3 | コントローラー* | ティーチペンダントで設定したポーズや動きに従ってロボットの動きを調整します。様々な入出力ポートが備わっており、様々な装備と装置をつないで使用できます。 |
| 4 | スマートペンダント** | サーボのON/OFFやすでに設定されているプログラムの実行/終了など、簡単な機能が使えるペンダントで、ロボットを手軽にコントロールできます。 |
| 5 | 非常停止ボタン* | 基本構成品で、ラップトップの使用時、ティーチペンダントの非常停止ボタンの役割をします。 |
| 6 | マニピュレーター* | 物体を運搬したり部品を組み立てるのに使用できる産業用協働ロボットで、様々なツールを取り付けて使用できます。 |
| A | Command/ Monitoring | |
| B | Command | |
| C | Power Supply/ Network |
- 基本構成品(*)とオプション品(**、別途で購入)に区分
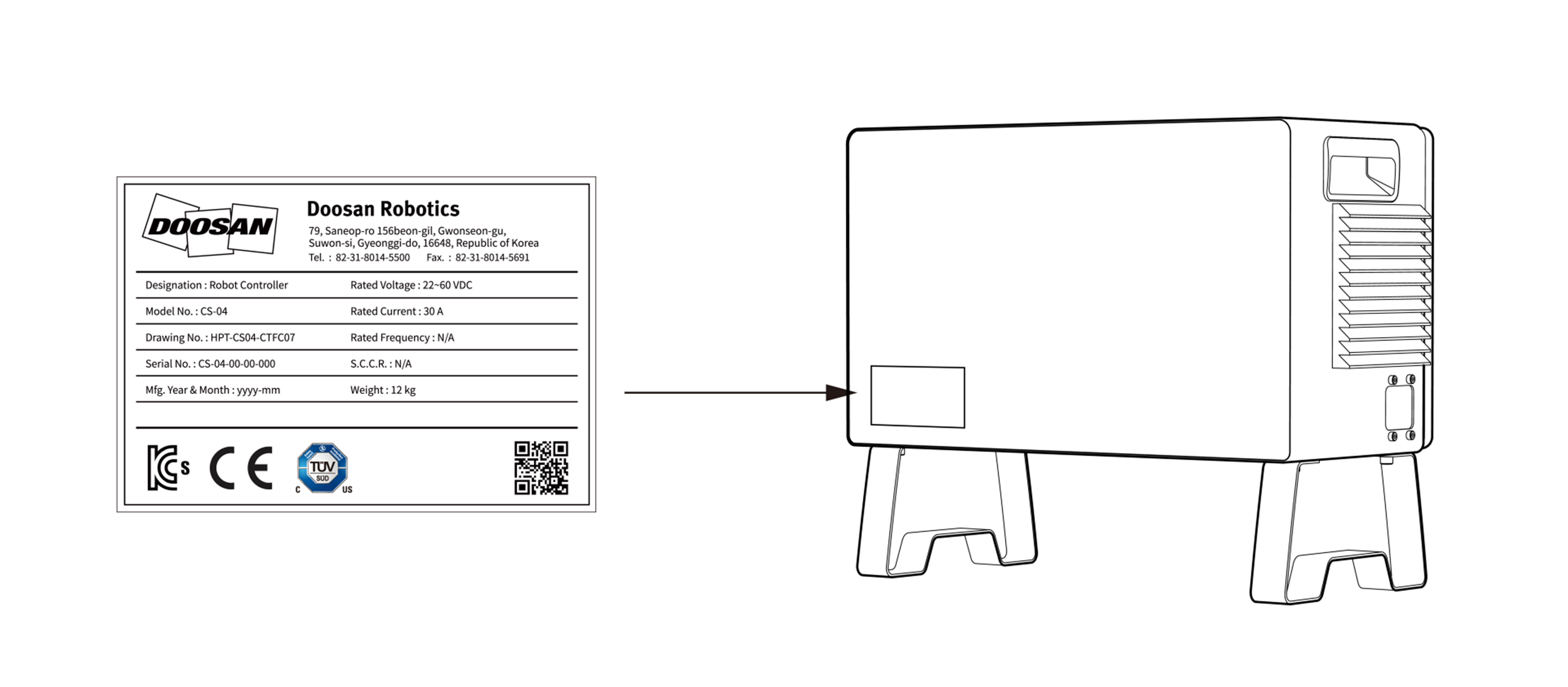
ラベル