強制コマンドのサンプルを試行します
オプション 標準( NORMAL ) 20 分

このサンプルは Task Writer に作成されます。このサンプルは、タスクビルダでほぼ同じ方法で試すことができます。
注意
- サンプルを試す前に、必ず読み、それに従って 使用時の注意事項ください。詳細については、を参照 パート 1 :安全マニュアルしてください。
- このサンプルでは、で作成された Task Writer ファイルが必要 コンプライアンスコマンドのサンプルを試してくださいです。
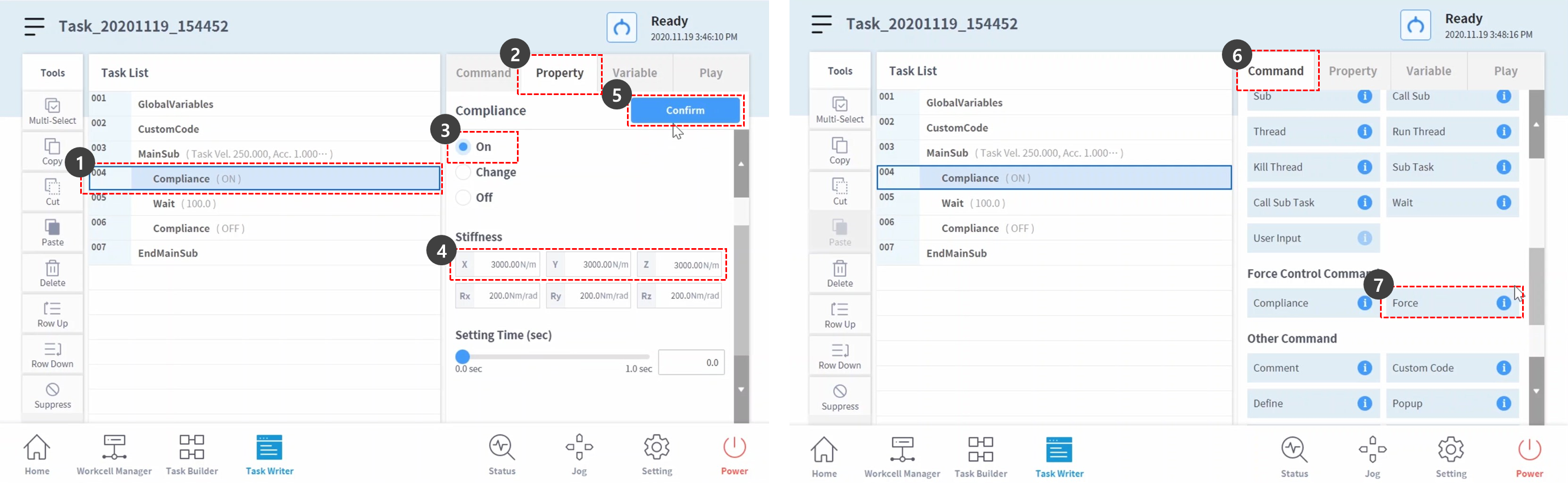
- コンプライアンスコマンドのサンプルを試してください 作成した Task Writer ファイルを開き、タスクリストの 4 行目でコンプライアンスコマンドを選択します。
- [ プロパティ ] タブを選択します。
- モードを次のように設定します。モードをオンにすると、コンプライアンス制御が有効になり強制コマンドは、コンプライアンス制御が有効になっている場合にのみ使用できます。
- モード:オン
- デフォルトの剛性値を次のように設定します
- X 、 Y 、 Z :3000 N/m (デフォルト)
- Rx 、 Ry 、 Rz :200 Nm/rad (デフォルト)
- 確認ボタンを押します。
- [ コマンド( Command ) ] タブを選択する。
- 力コマンドを追加します。このコマンドは、強制制御をイネーブルにするために使用する予定です。
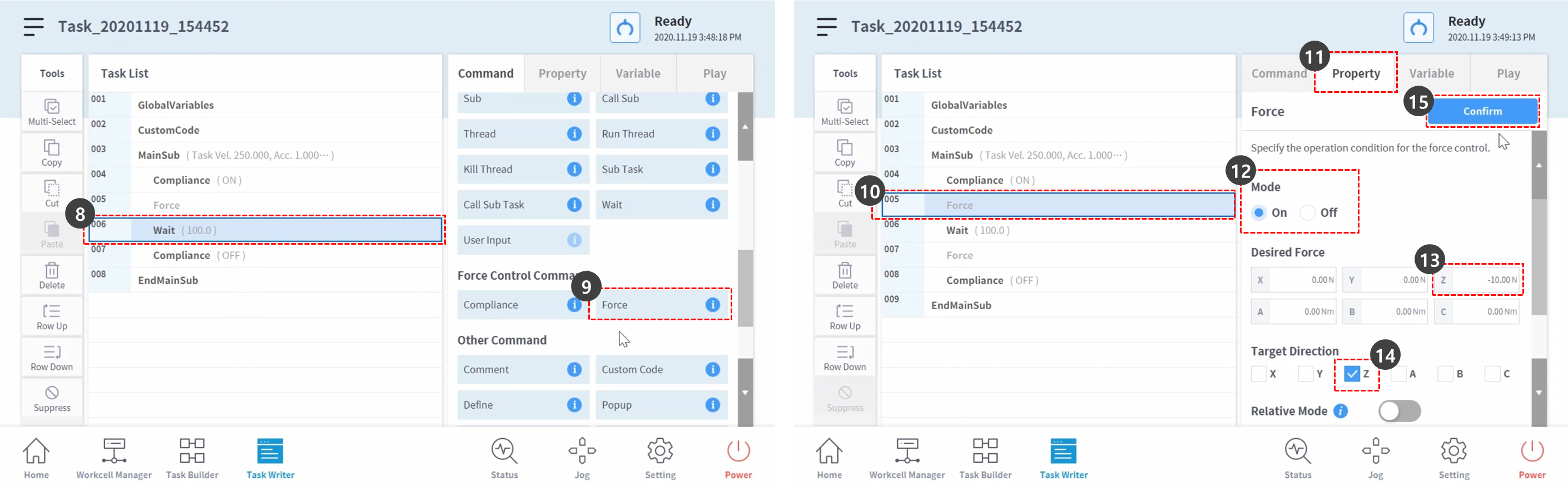
- タスクリストの 6 行目を選択します。
- 力コマンドを追加します。このコマンドは、強制制御を無効にするために使用する予定です。
- タスクリストの 5 行目から力コマンドを選択します。
- [ プロパティ ] タブを選択します。
- モードを次のように設定します。モードオンでは、強制制御が有効になります。
- モード:オン
- 必要な力を次のように設定します。
- X :0 N (デフォルト)
- Y :0 N (デフォルト)
- Z :-10 N
- Rx 、 Ry 、 Rz :200 Nm/rad (デフォルト)
- ターゲット方向( Target Direction )で Z 軸のみをチェックします。
- 確認ボタンを押します。
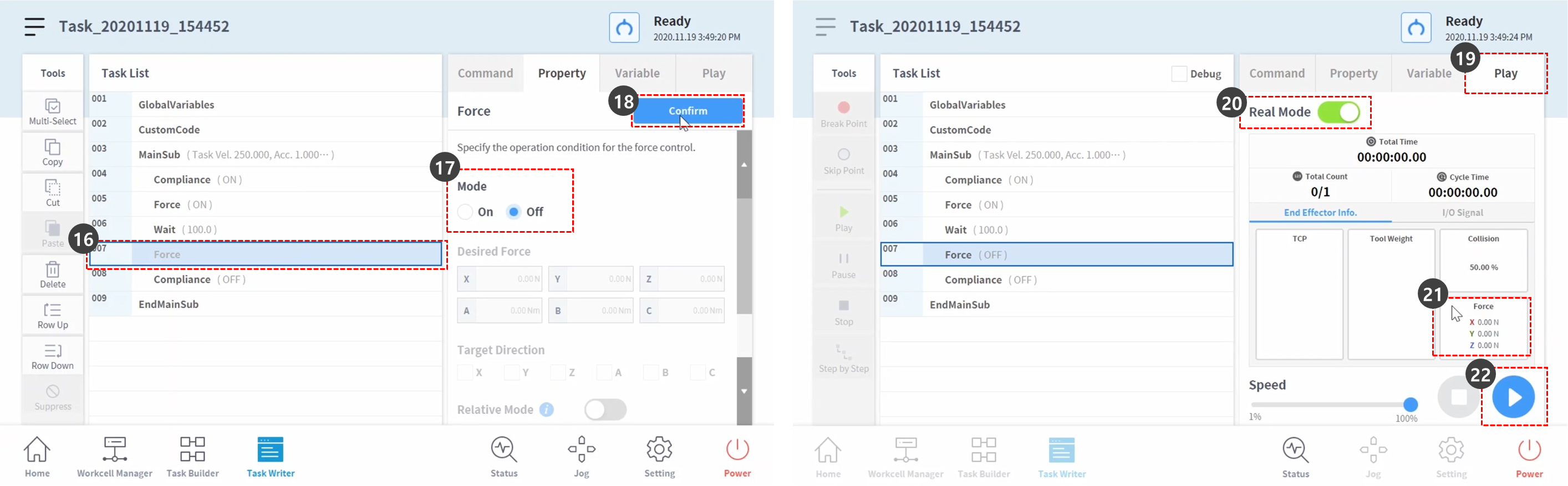
- タスクリストの 7 行目から [ 強制 ] コマンドを選択します。
- モードを次のように設定します。モードオフでは、強制制御が無効になります。
- モード:オフ
- 確認ボタンを押します。
- [ 再生( Play ) ] タブを選択する。
- リアルモードトグルボタンを有効にします。
- 切り替えボタンが有効になると、ボタンが緑色に点灯します。
- 各軸の TCP 力が 0 かどうかを確認します。この力の値は、ロボットエンド TCP に現在適用されている外部力のサイズです。
- 再生ボタンを押します。
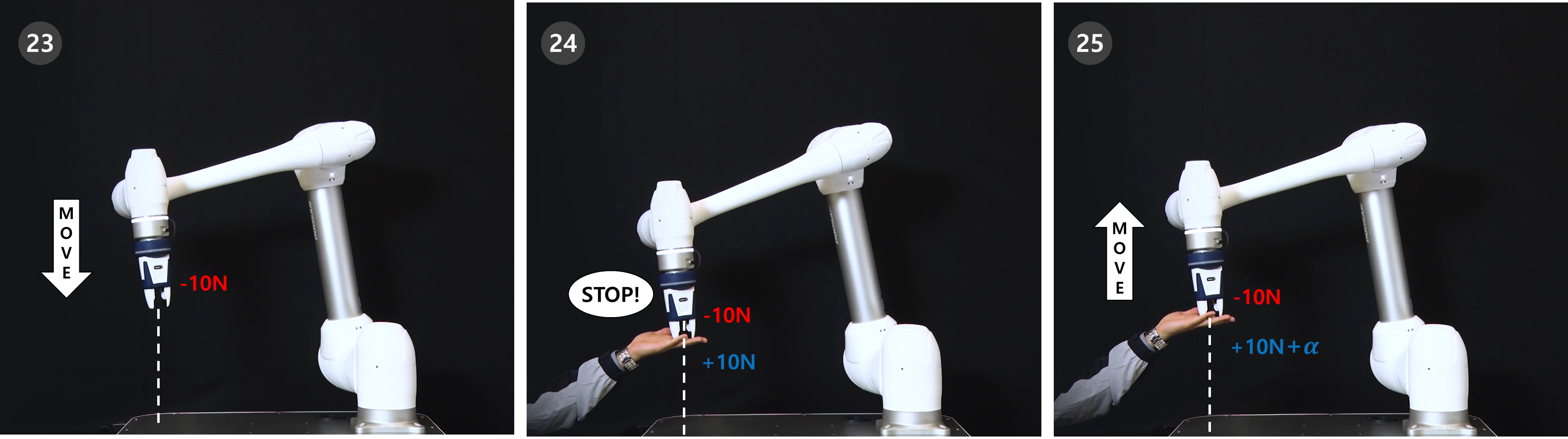
- - ロボットエンド TCP に -10N の力が加えられ、ロボットが -Z 軸方向にゆっくりと移動します。
- ロボットの端部は、ロボットの移動方向の反対側にある +Z 軸方向にロボットの移動を反発します。ロボットを動かす力と、ロボットの動きを反発させる力がバランスに達すると、ロボットは停止したかのようにその位置を維持します。
- ロボットに +10N より大きい力が適用されると、ロボットはロボットに適用された力に準拠し、力の方向に移動します。