ロボットモーションのプロパティを理解する
必須 標準( NORMAL ) 15 分
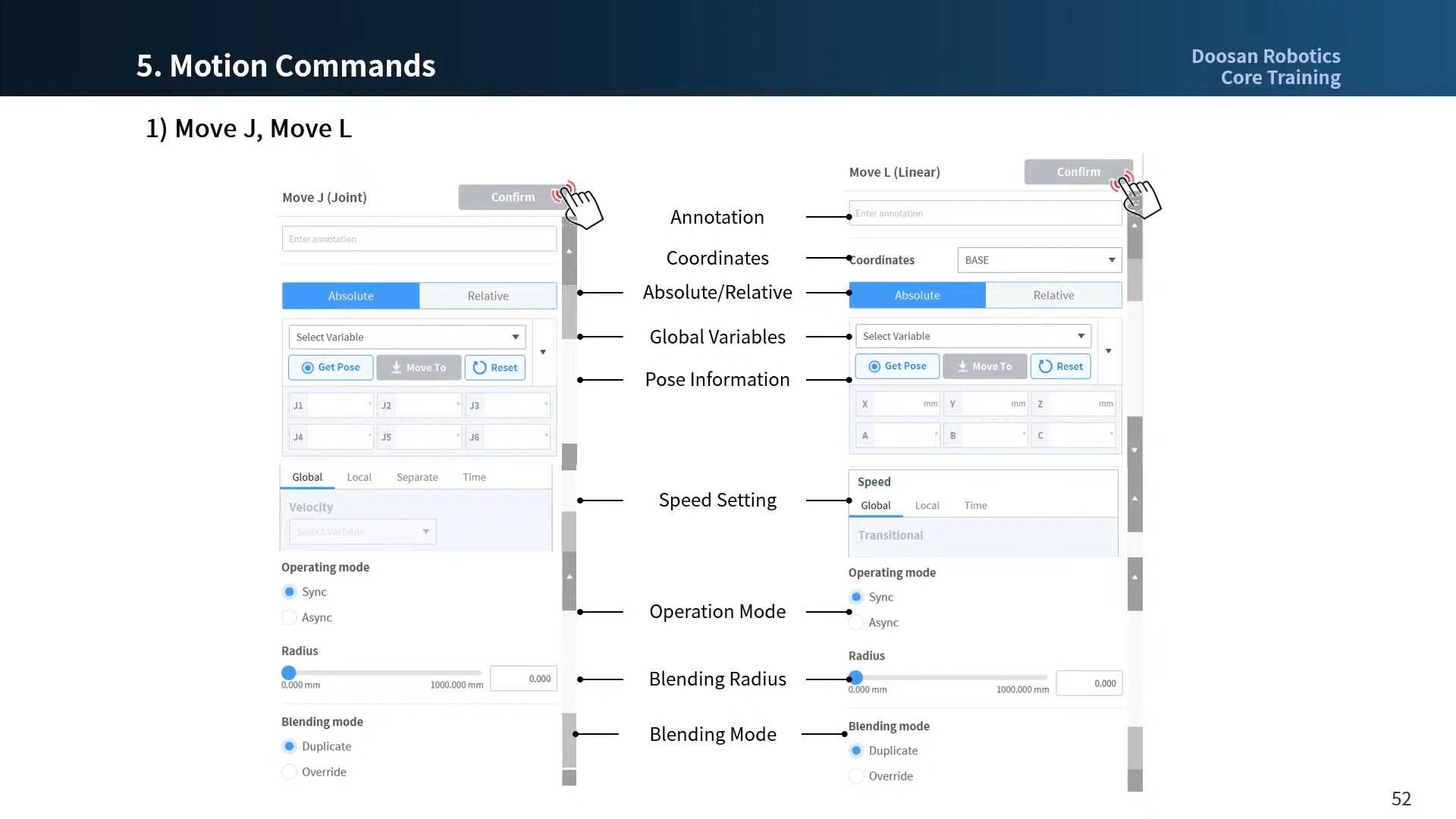
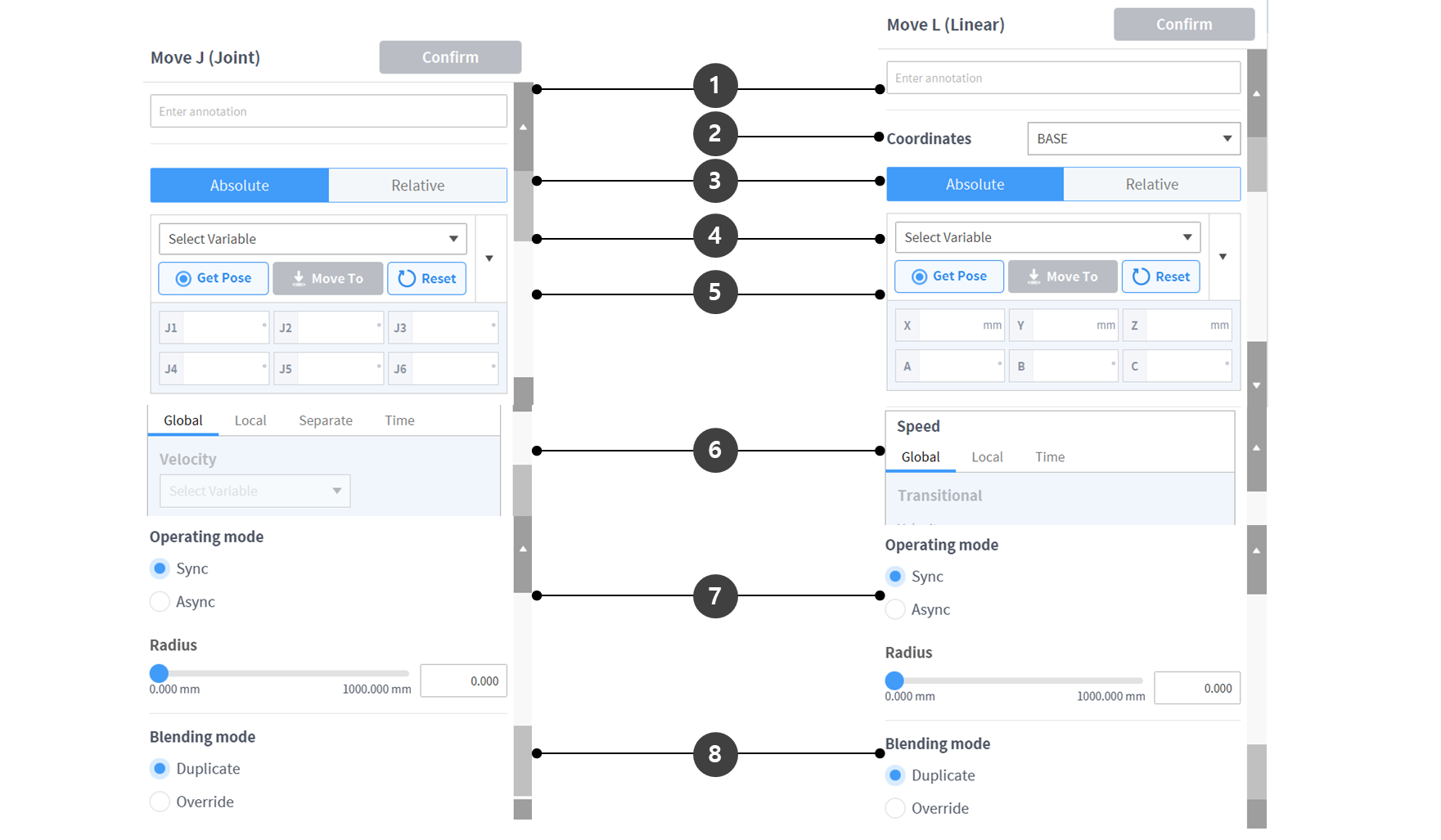
これは、標準モーション、 MoveJ および MoveL コマンドのプロパティ画面です。他の動作にも同様のプロパティがあります。
- 最小設定でモーションを作成する場合は、ポーズ情報(下の図の 5 )のみを入力する必要があります。
| 名前( Name ) | 説明 | |
|---|---|---|
| 1. | 注釈( Annotation ) | タスクウィンドウに表示されるコマンドの説明または注釈 |
| 2. | 座標 |
|
| 3. | 移動タイプを選択します |
|
| 4. | 変数を選択します | 変数として登録されたポーズ情報を選択できます |
| 5. | ポーズ情報 | ポーズ情報が入力されます
|
| 6. | 速度設定 |
|
| 7. | 操作モード |
|
| 8. | 描画モード | 先行するモーションのオプションとして半径が設定されている場合に ' 次のモーションのブレンドモードに従って ' 前のモーションを無視するか上書きするかを決定するために使用するオプション |
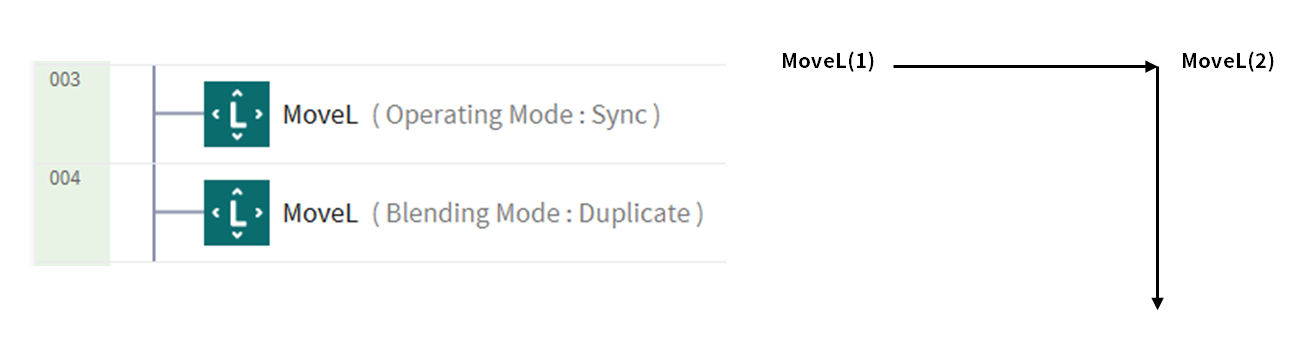
動作モード
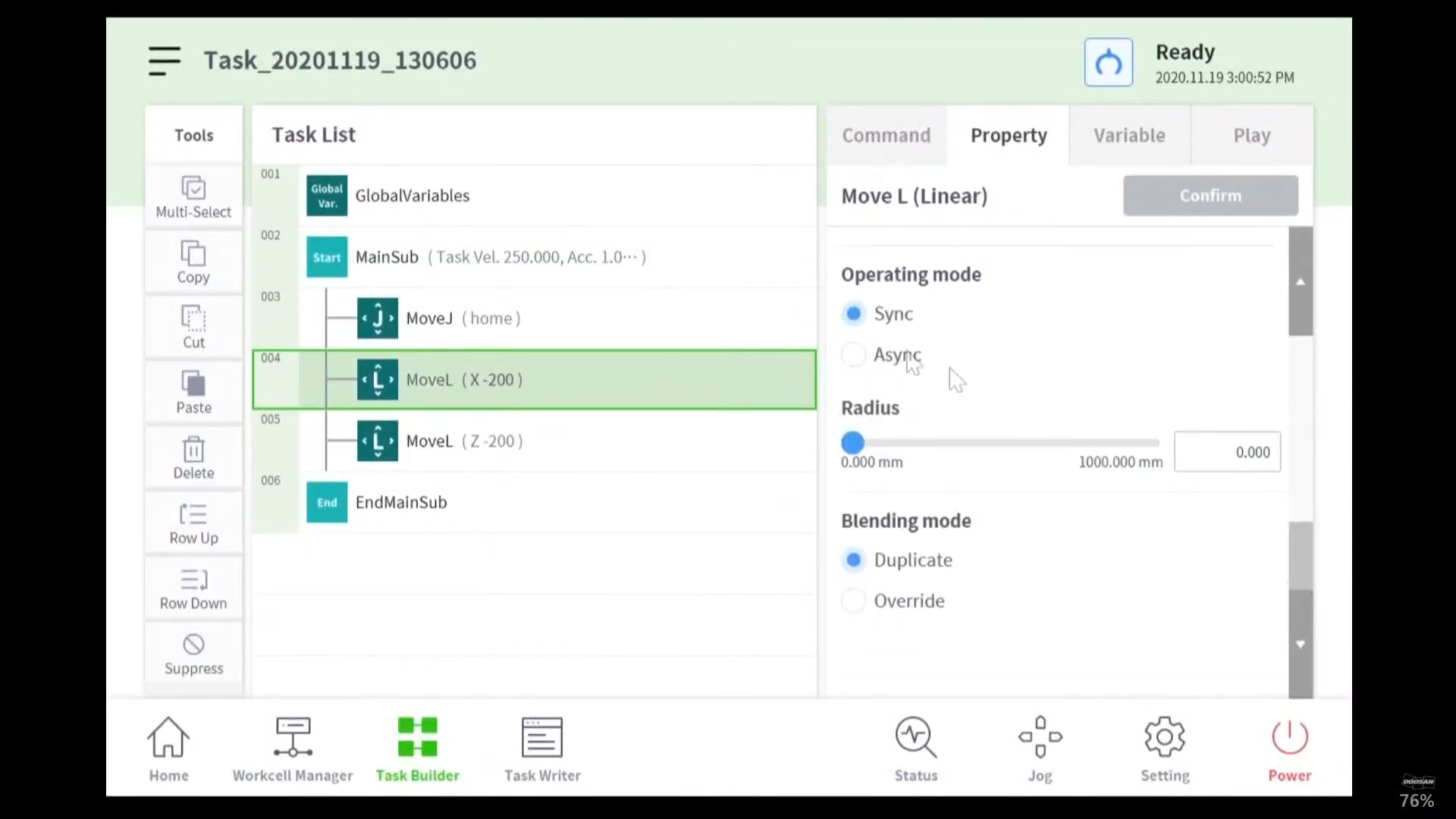
同期
進行中のコマンドが完了したら、同期を使用して次のコマンドに移動できます。デフォルトとして設定され、一般的な状況で使用されます。
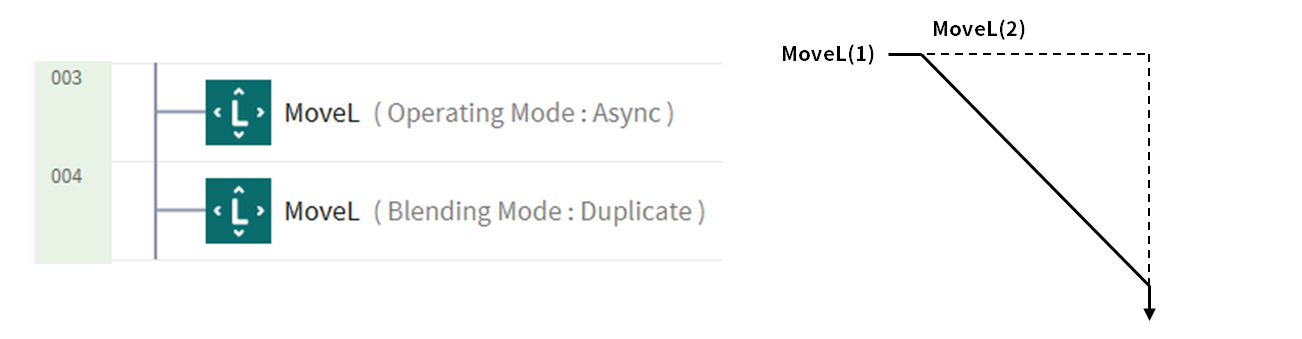
非同期
async は、モーションコマンドが開始されると同時に次のコマンドを開始します。これは、さまざまな動作をスムーズに接続するために使用されます。また、動作開始時に信号出力を同時にオン / オフするときにも使用されます。
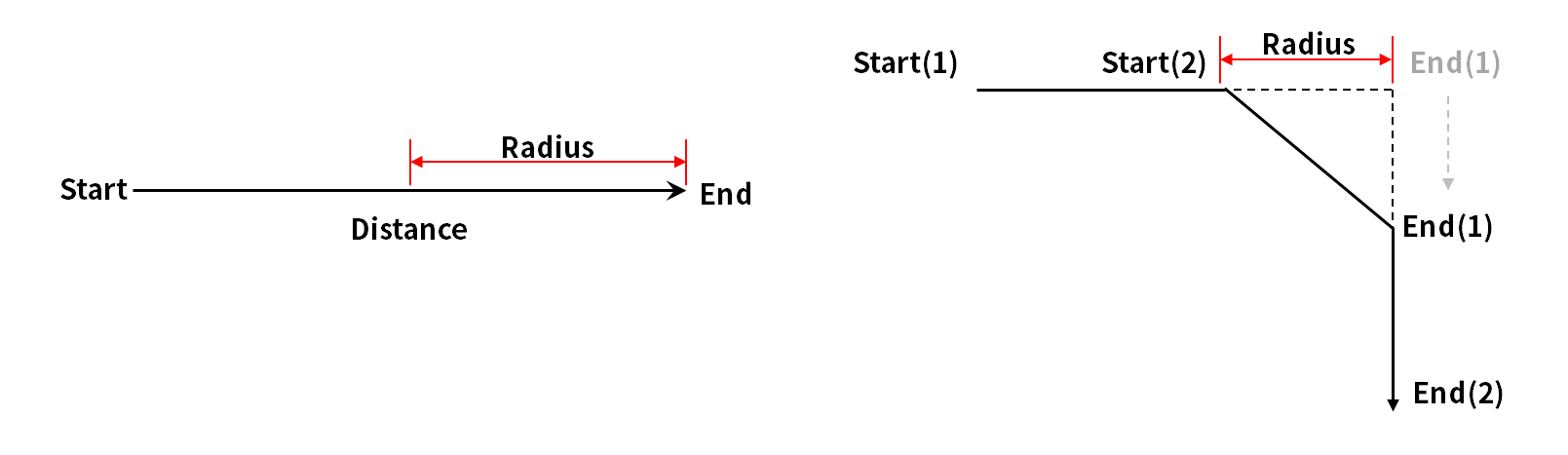
半径( Radius )
半径( Radius )オプションは、モーションコマンドがターゲット点に到達する前に、半径セクションの非同期機能を活動化します。このオプションを使用すると、現行の動作コマンドを停止せずに、次の動作コマンドにスムーズに接続できます。半径はデフォルトで 0 mm に設定されています。
注意
RADIUS オプションには、次の特性と制限があります。
- RADIUS 機能は同期モードでのみ使用できます。
- 条件と計算は、半径内の非同期セクションで実行できます。
- 半径は、モーションが実行される前に、現在の位置とターゲット位置の間の合計距離の 1/2 を超えることはできません。
- 例:移動距離が 100 mm の場合、使用可能な最大半径は 50 mm です。
- モーション間にブレンドを適用できないモーションコマンドは、次のとおりです。これらのコマンドではブレンドがすでに適用されているため、これらのコマンドに半径を適用して実行するとエラーが発生します。WaitMotion や StopMotion などのコマンドを使用すると、エラーを回避できます。
- MoveSX 、 MoveSJ 、 MovePeriodic 、 MoveSpiral 、 MoveB
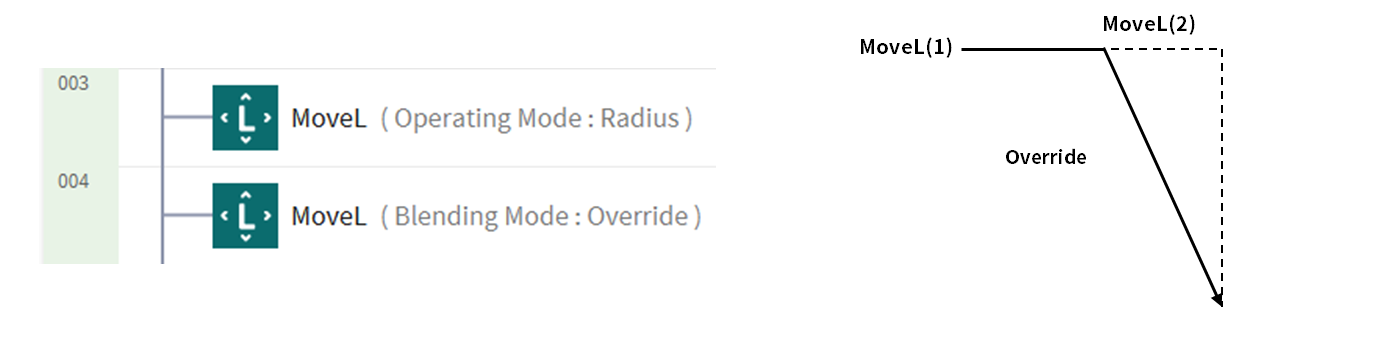
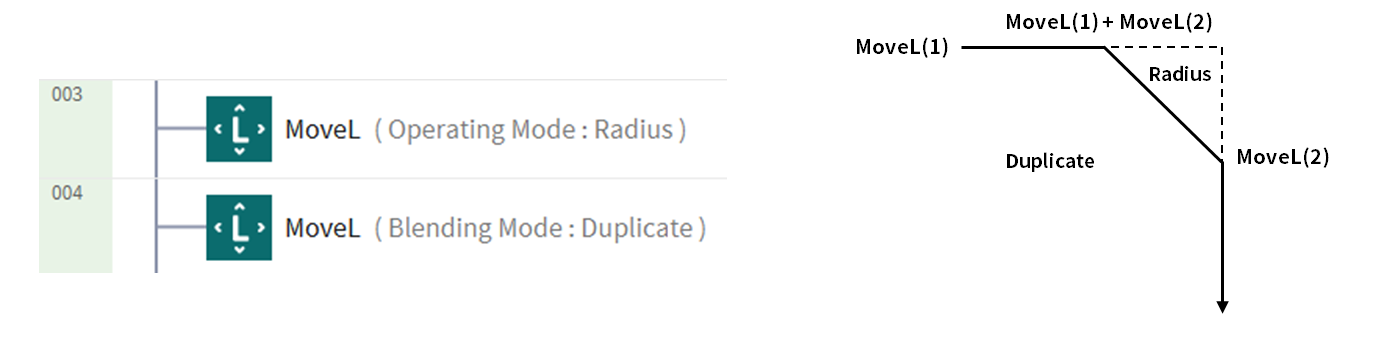
描画モード
このオプションを使用すると、先行するモーションのオプションとして半径が設定されている場合に、次のモーションの描画モードに従って、前のモーションを無視するか上書きするかを指定できます。
複製
複写は、先行する動作を維持して、次の動作が先行する動作とオーバーラップできるようにするモードです。
オーバーライド
オーバーライド (Override) - 前のモーションを無視して上書きし ' 次のモーションを実行します