
プログラミングを開始します
必須 簡単 3 分
注意
- プログラミングの前に、安全設定、インストールポーズ、およびツール設定を Workcell Manager で完了する必要があります。詳細については、を参照 ステップ 3 :ロボットの操作と設定してください。
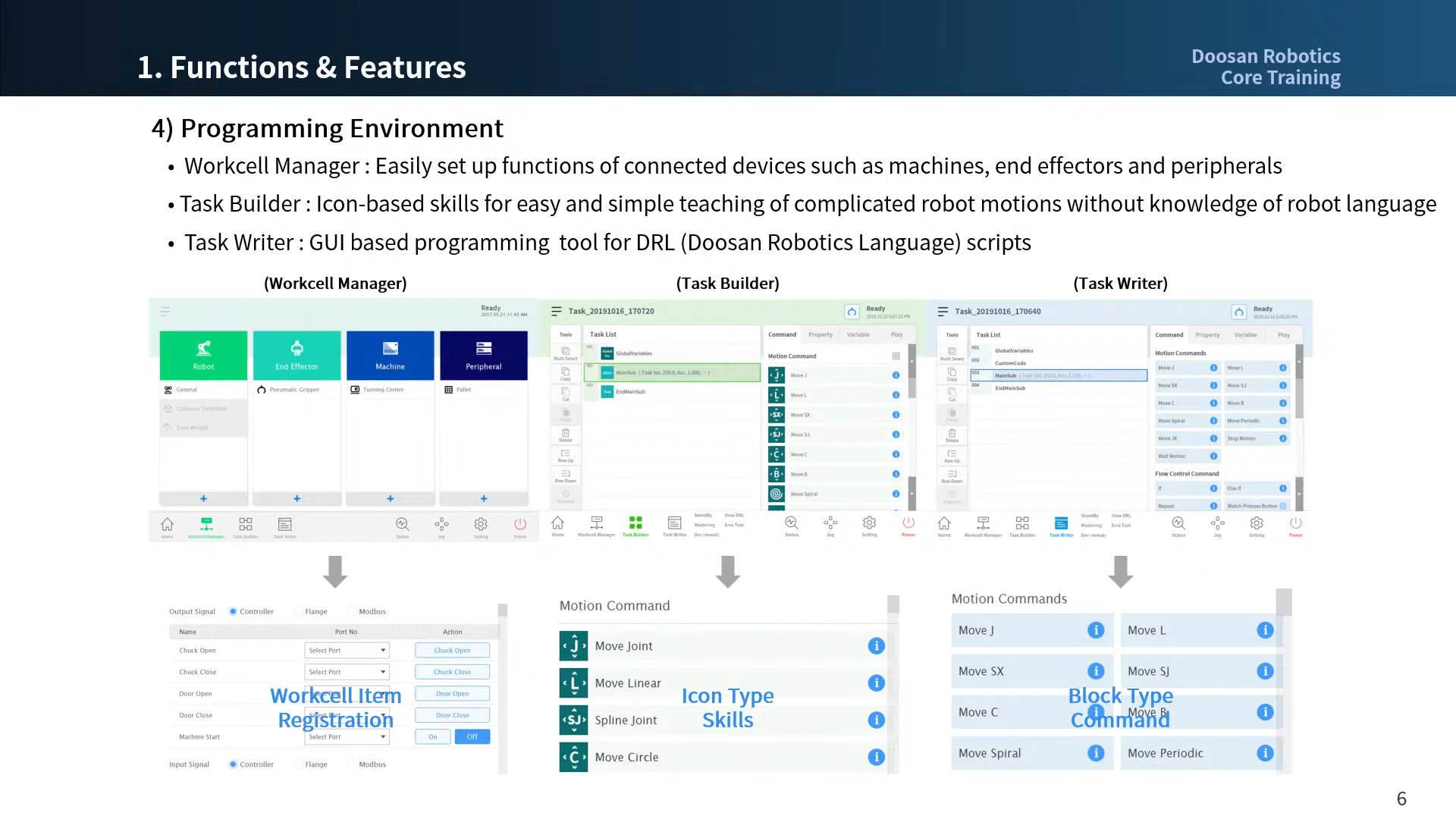
Doosan Robotics は、 2 種類のタスクプログラミング環境を提供しています。
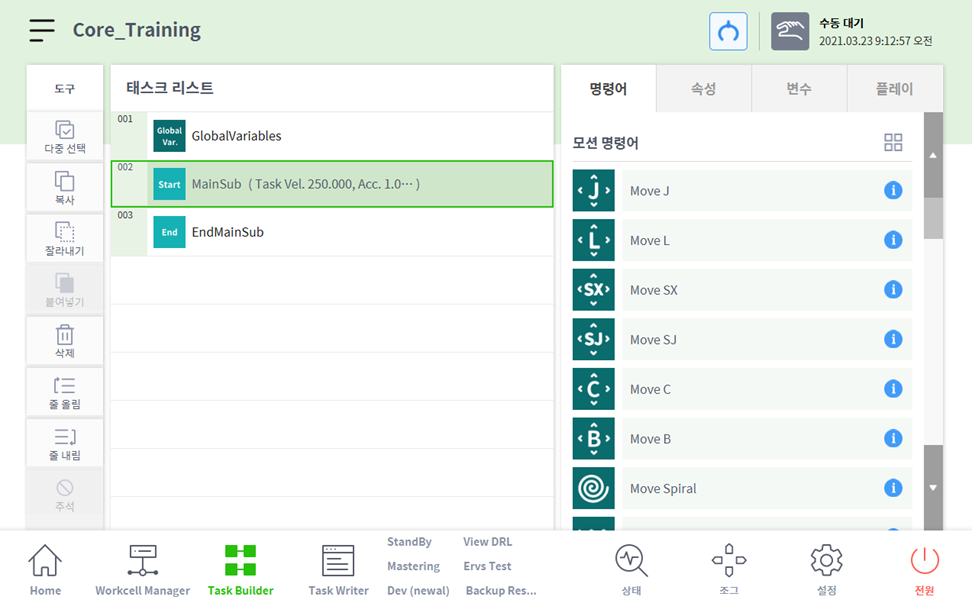
- タスクビルダー:これは、コマンドアイコンとスキルアイコンを使用したアイコンブロックベースのコーディング環境です。スキルは 'Workcell Manager に登録されている Workcell Items に基づいてサポートされます
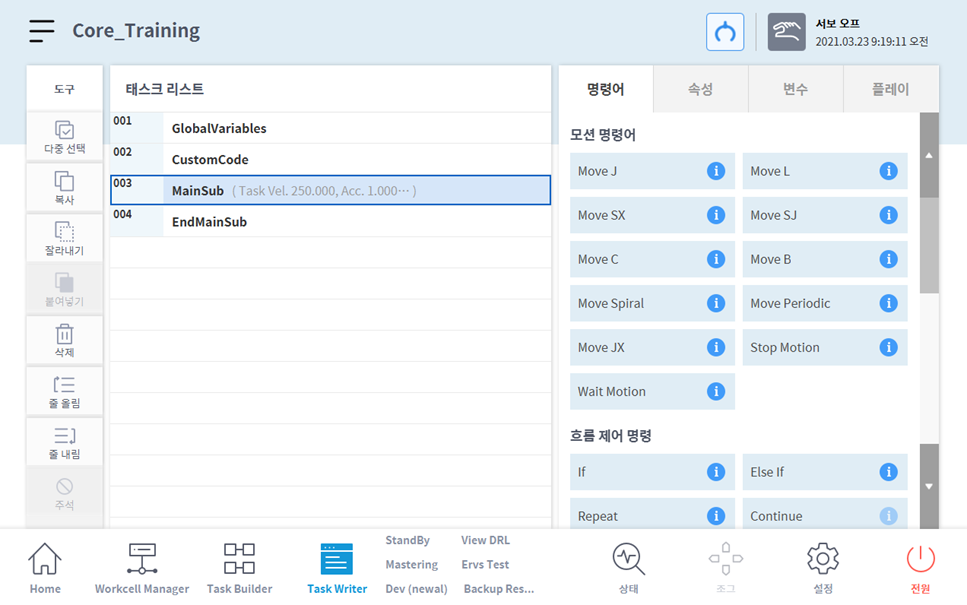
- タスクライター:これは、ティーチペンダントへの入力を容易にするスクリプトベースのプログラミングを利用したブロックベースのコーディング環境です
2 つのプログラミング環境の違いは次のとおりです。一般的に、初心者ユーザーまたはスキルを使用するユーザーは、 Task Builder を使用します。スキルを使用したくない中間ユーザーは、タスクライターを使用して簡単にプログラミングできます。
| 分類 | タスクビルダ | タスクライタ | |
|---|---|---|---|
| 1. | 主題 | スキルを使用する必要がある初心者ユーザーまたはユーザー | 中間ユーザー |
| 2. | ブロックベースのコーディング | o | o |
| 3. | コマンドアイコンの使用 | o | X |
| 4. | スキルサポート | o | X |
| 5. | 画面 |
|
|
注
斗山ロボットの技術とは
- 1 つのプロセスで必要なさまざまなコマンドを 1 つの設定でバンドルすることで、インターフェイスを簡単に使用できるように設定するコマンドです。
- タスクビルダーでのみ使用でき、各スキルは 1 つのブロックとして表示されます。たとえば、 [ ピックスキル( Pick skil ) ] および [ 配置スキル( Place skil ) ] の [ タスクビルダ( Task Builder ) ] アイコンブロックは次のとおりです。
