
ロボット設定 - ワールド座標を設定します
オプション 標準( NORMAL ) 3 分
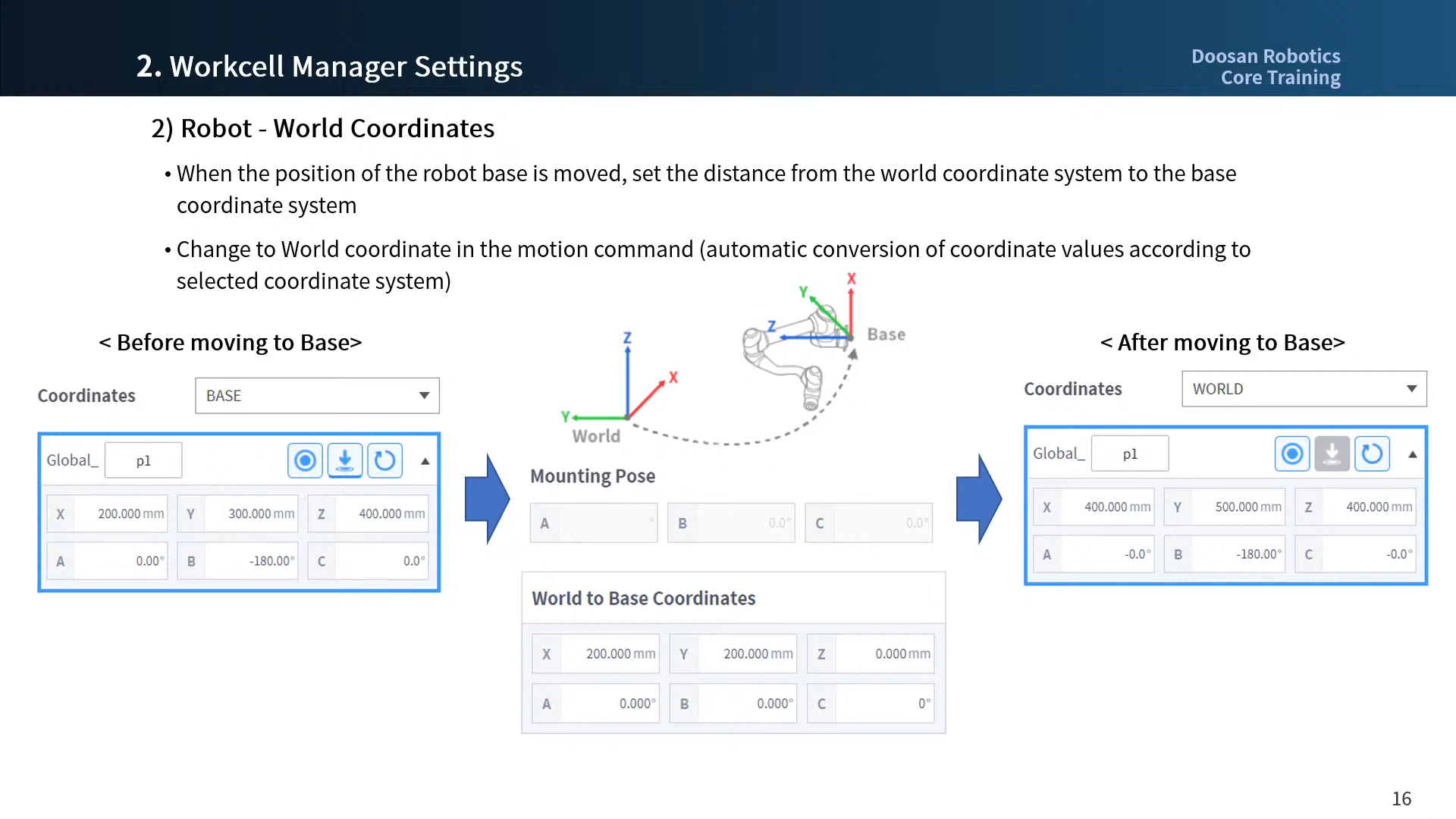
ロボットのワールド座標はワールド座標から設定できます。ロボット座標がベース座標の場合、このステップはスキップできます。
ワールド座標は、 [ ワークセルマネージャー( Workcell Manager ) ]>[ ロボット( Robot ) ]>[ ワールド座標( World Coordinates ) ] で設定でき ます詳しくは、『ワールド座標の設定』を参照 ワールド座標系を設定するしてください。
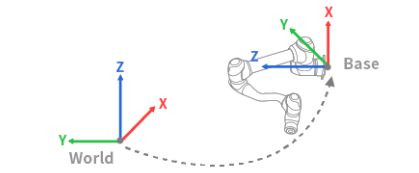
- ワールド座標は、ロボットベースの設置場所が物理的に移動 / 回転されるときに使用されます。
- ワールド座標を変更すると、同じ移動 / 回転がロボットシミュレータ画面に適用されます。
注
ワールド座標は、ロボット教育後にベース位置と角度が変更された後でも使用できます。過去にロボット教育によって作成されたタスクの座標がベースからワールドに変更された場合、ワールド座標の移動 / 回転に対応するオフセットがすべてのモーション座標に適用されます。