
ワイヤを接続します
必須 標準( NORMAL ) 10 分
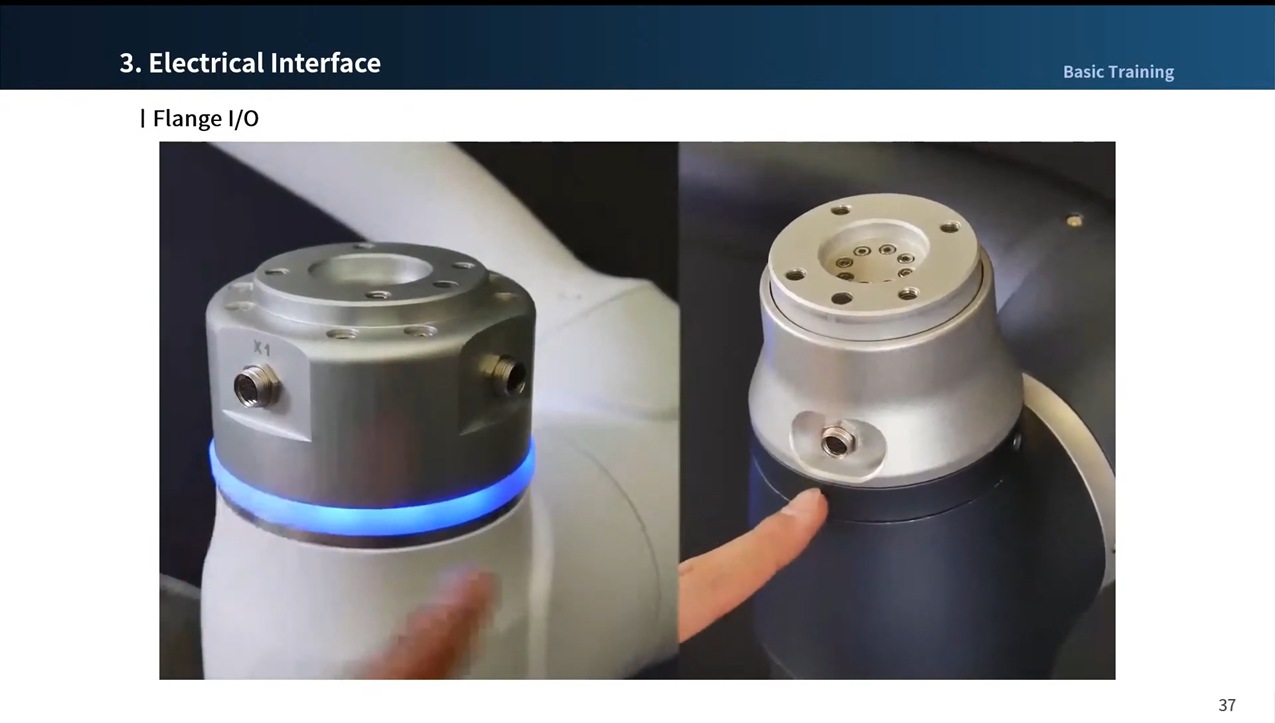
ツールを固定した後、必要なケーブルをフランジ I/O コネクタに接続します。フランジ I/O のピンマップを確認する必要があります。
- ロボットに電源が供給されると、各コネクタの 5 番目の端子は常に 24V を出力します。
- 詳細については、を参照 フランジI/Oしてください。
注意
- ツールとグリッパーを接続するときは、必ずロボットのパワーを切断してください。
- ロボットの電源を切ったときに部材がツールから落下しないように、ツールとグリッパーの測定をコンフィグレーションしてください。
A シリーズの場合、ロボットがサーボオフに設定されると、 24V フランジ I/O 電源が遮断されます。そのため、工具から部材を取り扱う際に危険な状況を防ぐために、工具またはグリッパーの測定値を必ずコンフィグレーションしてください( [ 通常のクローズ ] ステータスに設定)。
注
外部装置を使用してロボットを制御 / 監視するには、コントローラ I/O を接続するか、 Modbus TCP 、 PROFITNET 、 EtherNet/IP などのネットワークに接続します。
- 詳細については、を参照 コントローラーのI/O接続してください。
- 詳細については、を参照 ネットワーク接続してください。