
システムの復元
ロボットシステムをユーザーが選んだ特定のバージョンに復元します。
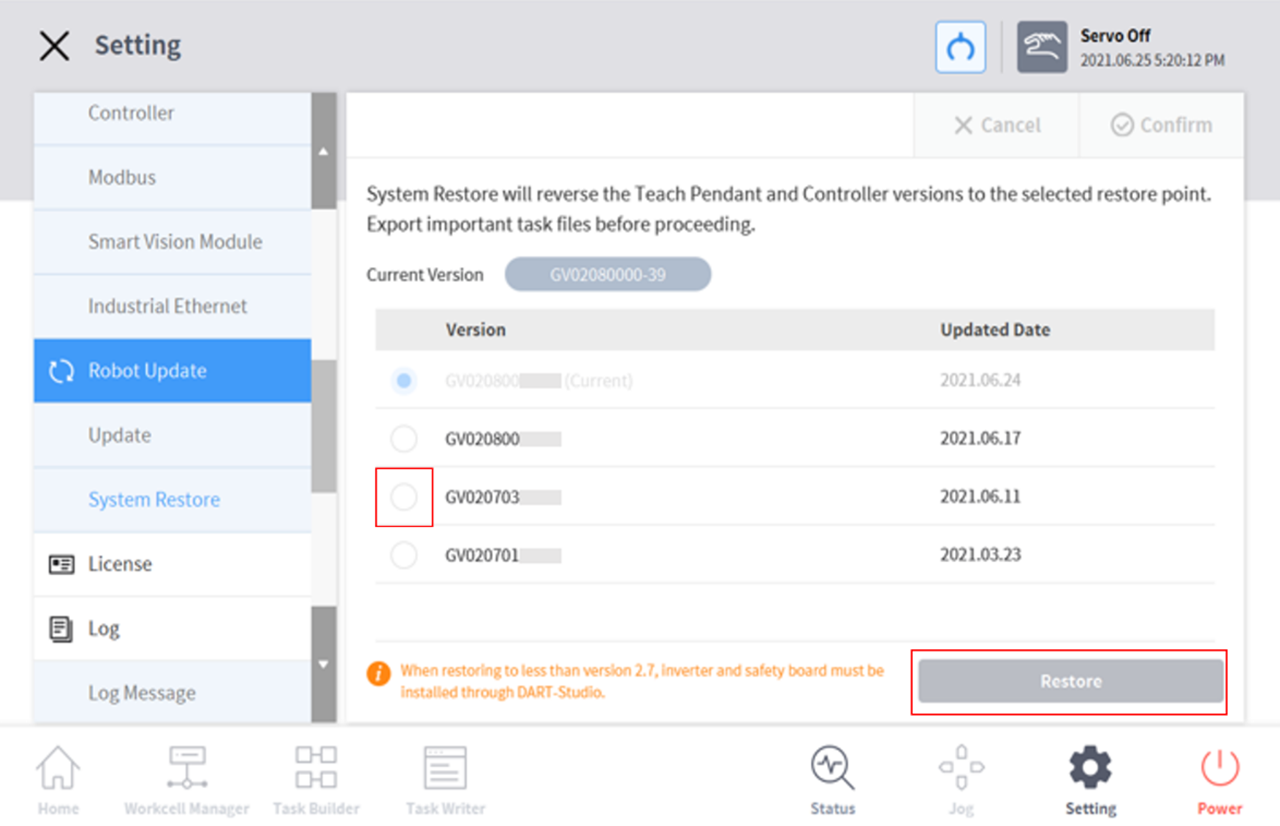
- 設定メニュー領域でUpdate Robot > システム復元メニューを選択してください。
- ロボットシステムに設置されている直近5つまでのバージョンが画面に表示されます。
- 現在のバージョンのラジオボタンが選択された状態で表示されます。
- 復元したいバージョンのラジオボタンを選択してください。
- 復元ボタンが有効化します。
- 復元ボタンを押してください。
- 復元が完了したら、システムを再起動させてください。
メモ
- Windowsで接続した場合は、システムの復元機能が提供されません。
Version : A Series
- Aシリーズでシステム復元後、次のような問題が発生した場合は、"摩擦較正(Friction Calibration)"を参照して摩擦較正を行わなければなりません。
1.ダイレクトティーチングの操作が難しくなる問題が発生する場合
- Toolの重量と重心を正確に設定したのにもかかわらず、ダイレクトティーチングが正常に動作しない場合
- ダイレクトティーチングを試した時、ロボットが早く流れるか、助ける力が強すぎる場合
- ダイレクトティーチングを試した時、一つの方向への操作が難しい場合
- Default衝突感度の設定状態で衝突感知が頻繁に発生する場合
2. 断続的にティーチペンダントで'2.9015'エラーが発生する場合
- 9015エラー:ロボットの端の外力が安全範囲を超えました。