
スマートペンダントを設定する
注意
スマートペンダントを設定するは、A Seriesのオプションとして提供される機能を設定するための画面です。
- 設定メニュー領域でロボット設定にあるスマートペンダントメニューを選択してください。
- 現在設定された情報が設定管理画面に現れます。
- スマートペンダント使用トグルをONに変更してください。
- スマートペンダント使用がONに設定されている状態でリスタートする場合、遠隔制御モードに進入します。
- タスクを選択してください。
- スマートペンダントモードで使用するタスクです。
- Confirmボタンをクリックしてから、Start Smart Pendantボタンをクリックしてください。
- スマートペンダント専用のダッシュボード画面に移動し、スマートペンダントを利用した命令ができるようになります。
- Windowsでスマートペンダントモードを始めると、ティーチペンダントでもスマートペンダントの画面切り替えが行われるようになります。
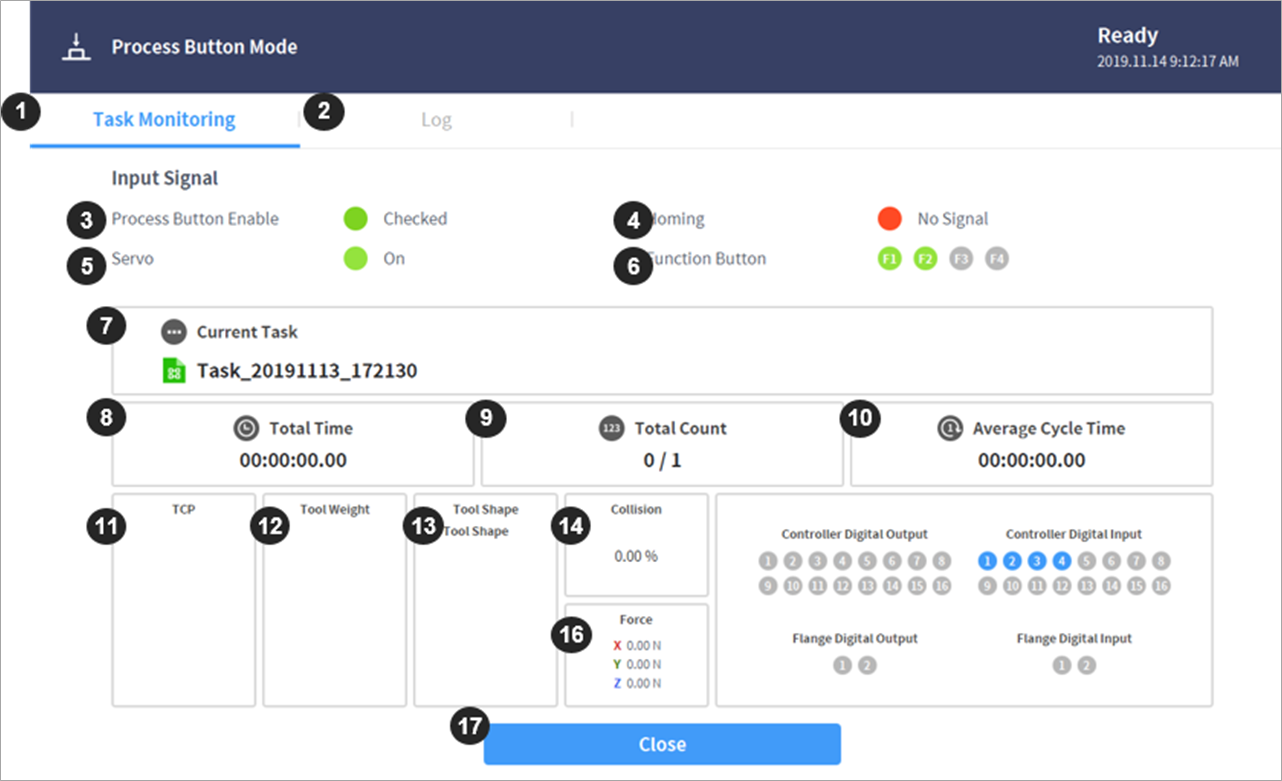
番号 | 項目 | 説明 |
1 | Task Monitoring Tab | スマートペンダントの入力信号と、Taskの実行に必要なモニタリング情報を表示するタブ |
2 | Log Tab | タスクの実行中に収集されたログメッセージを表示するタブ |
3 | Smart Pendant Enable Signal | スマートペンダントがコントローラーに正常に接続されると、Checked(グリーン)に表示される。 |
4 | Homming Signal | スマートペンダントのhommingボタンを押すと、表示灯がChecked(グリーン)に表示される。 |
5 | Servo On/Off Signal | Servo On/Offの状態を表示する。 |
6 | Function Button Signal | P1~P4の押し状態を示す表示灯。 |
7 | Current Task | スマートペンダントで使うタスクを表示する部分 |
8 | Total Time | 全体Taskのプレイタイム |
9 | Total Count | Taskループされたカウント |
10 | Average Cycle Time | タスク回数別の平均プレイ時間 |
11 | TCP Indicator | 現在のタスクで使用中のTCP情報 |
12 | Tool Weight Indicator | 現在使用中のTool Weight情報 |
13 | Tool Shape Indicator | 現在使用中のTool Shape情報 |
14 | Collision | Collision閾値の情報 |
15 | Force | Forceの情報 |
16 | Digital / Flange I/O information | Digital / Flange IOの情報 |
17 | Close | スマートペンダントモードを終了するためのボタン。 |
メモ
スマートペンダントモードで非常停止(Emergency Stop)または保護停止(Protective Stop)が発生すると、次のように処理されます。
- 非常停止:非常停止のポップアップが表示されます。非常停止の原因を取り除いた後、非常停止スイッチを引くか回してリセットすると、ポップアップが自動的に閉じます。
- Servo Off状態に切り替える保護停止:赤色の保護停止のポップアップ画面が表示されます。保護停止の原因を取り除いた後、スマートペンダントのServo Onボタンを押せば、ロボットサーボドライブが起動しポップアップ画面が自動的に閉じます。
- Interrupted状態に切り替える保護停止:黄色の保護停止のポップアップ画面が表示されます。保護停止の原因を取り除いた後、スマートペンダントのResetボタンを押せば、ロボットの状態が手動待機(Manual Standby)、自動待機(Auto Standby)、HGC待機(HGC standby)のうちの一つの正常待機状態に切り替わります。ロボットを動かさないと原因を取り除けない安全違反の場合、コクピットを活用した狭窄脱出機能(Clamping Escape by Cockpit)を使用することができます。
- 詳細については、「 モード別の状態とロボットLEDのカラー」で確認することができます。