
リアルモード画面:エンドエフェク情報タブ
Task Builderのリアルモードプレイ画面のエンドエフェクタ情報タブは下のように構成されています。
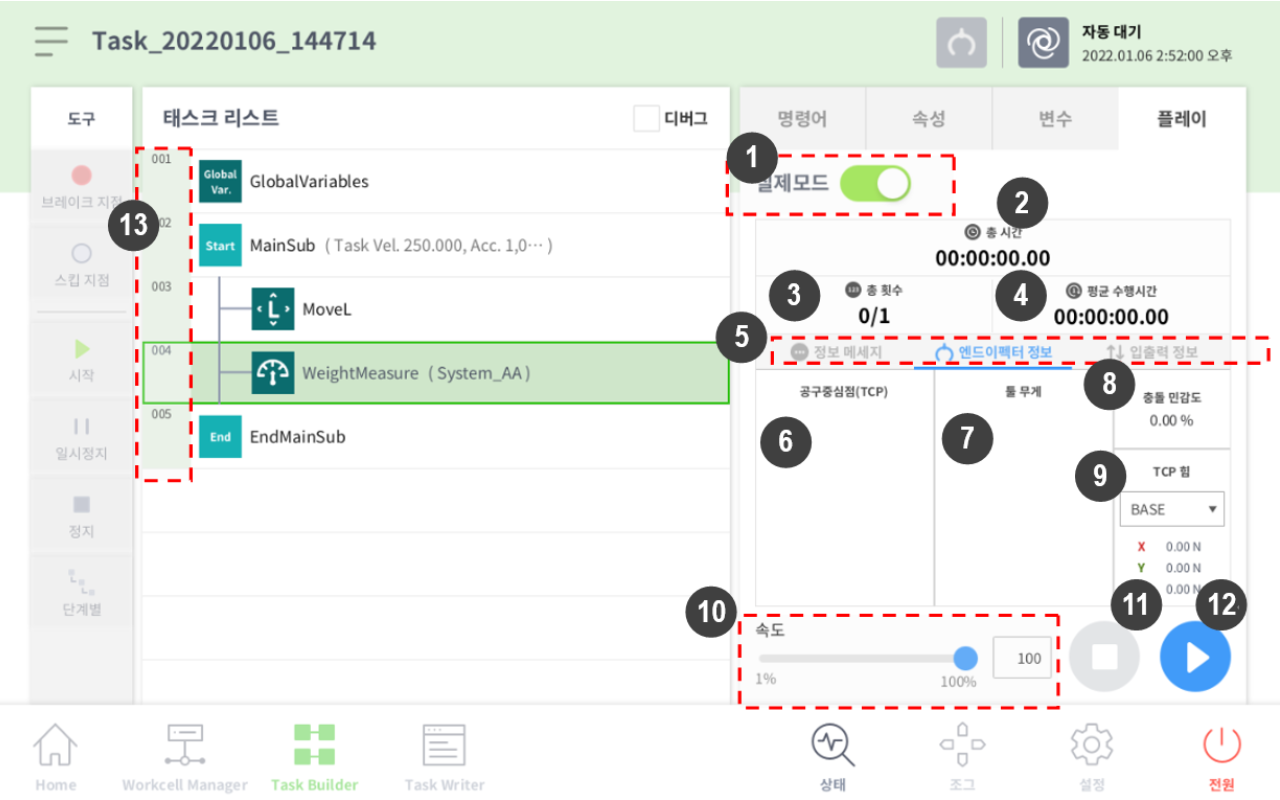
番号 | 項目 | 説明 |
1 | Real Mode ( | ロボットテストプレイモードを転換します。
|
2 | Total time | テスト実行後、経過した総時間を表示します。 |
3 | Total count | タスクが実行された回数を表示します。 |
4 | Average execution time | タスクリストの作業を1回遂行する際にかかる平均時間を表示します。 |
5 | Information Screen Shift Tab | ロボット情報メッセージ画面、エンドエフェクタ情報画面、入出力情報画面を切り替えることができます。
|
6 | Tool center point information area | Set TCP命令語或いはジョグのツール中心位置及び重量設定機能を通じて設定された、ツール中心位置情報を表示します。 |
7 | Tool weight information | Set TCP命令語或いはジョグのツール中心位置及び重量設定機能を通じて設定された、ツール重量情報を表示します。 |
8 | Collision information area | 現在ロボットが進入した作業スペースに設定された衝突感度値を表示します。 |
9 | Force information area | Base、World、User、Reference座標系に発生する力情報を表示します。Reference座標系はロボットに設定された座標系の情報を基準に力情報を表示します。 |
10 | Speed slider | リアル或いはバーチャルモードでロボットの速度を設定できます。 |
11 | Stop button | 実行中のタスクを停止します。 |
12 | Execute/pause toggle button | タスクリストの作業を再生、或いは一時停止させることができます。 |
13 | Time | 該当命令語/スキルを遂行する際にかかる時間を表示します。 |

注意
- リアルモードでタスクを実行する前にバーチャルモードでタスクを実行して、ユーザーが意図したとおりに作動するかどうか確認してください。
- 他の機械の作業領域外部で臨時ウェイポイントを指定し、ロボットプログラムを試験することを推奨します。斗山ロボティックスは、プログラミングのエラー又はロボットの障害に伴うロボット及び装備の損傷に対し、責任を負うものではありません。
- タッチペンダントに非常停止ボタンがあります。非常時には非常停止ボタンを押してロボットを停止させてください。
Force Toque Sensorがついていないモデルの場合、(X、Y、Z)の値はモニタリングされません。