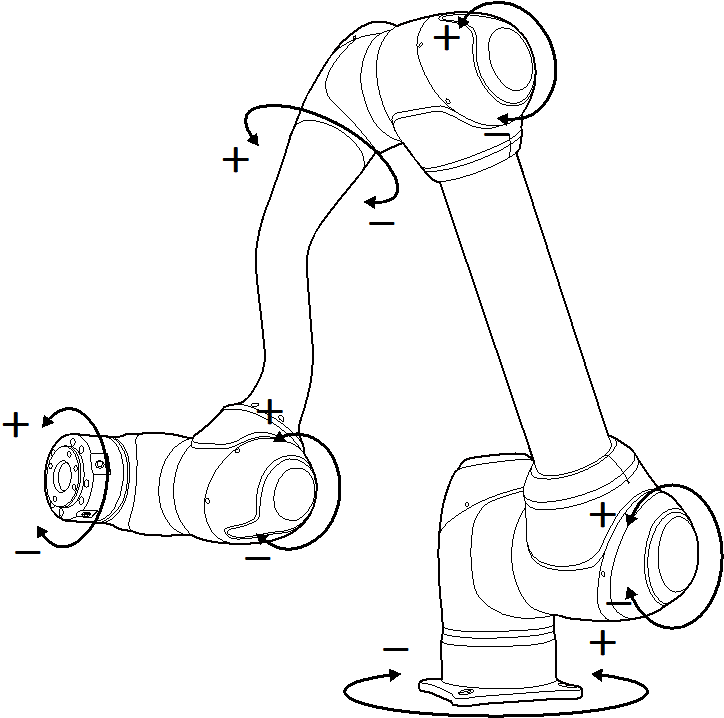
ロボットのジョイントを基準として角度を調節するには:
メモ
安全地域はバーチャルモードでは適用されません。
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.