
ツールの中心位置を設定する
ツールの中心位置(TCP)を設定するとき、フランジ座標系を基準に、位置と一緒に回転角も定義しなければなりません。このとき、フランジ座標系を基準とした原点からツール中心位置(TCP)までX、Y、Z各方向別の距離が10000mm以上になるように、ツール中心位置(TCP)を設定することはできません。また、X、Y、Zの換算した長さ(
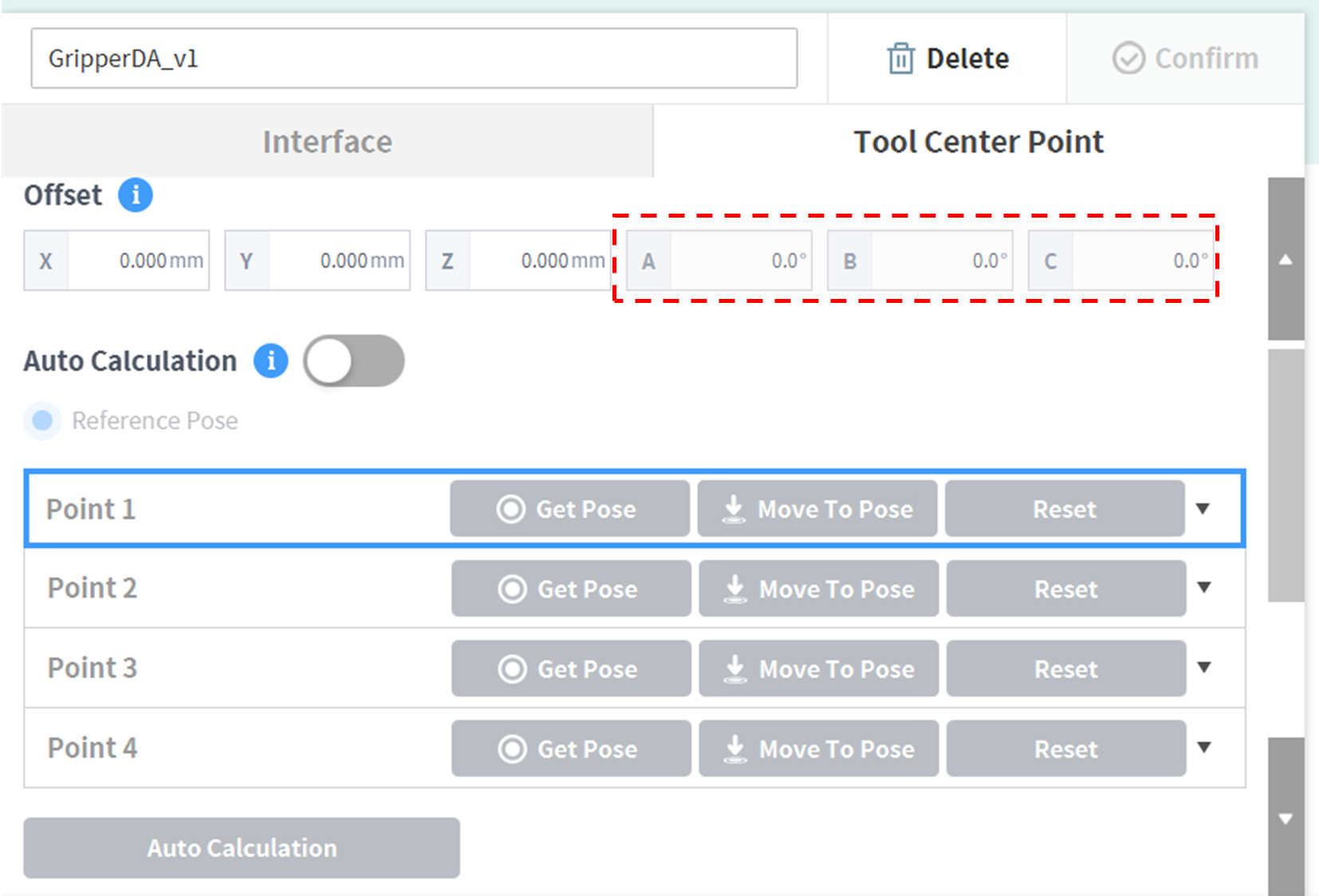
特に、Auto Calculationによってツール中心位置を設定する場合、X、Y、Zの位置だけ自動計算されるため、回転角はユーザーが入力しなければなりません。回転角はA、B、Cの三つの項目で指定でき、これは‘オイラー Z-Y-Z (Euler Z-Y-Z angles)’回転方法を基にしています。
下の図で小文字のx、y、zで表現される座標軸と、大文字のX、Y、Zで表現される座標軸の定義は次のとおりです。
- ‘フランジ座標系’の座標軸(x、y、z) : フランジの端で定義される‘フランジ座標系’の座標軸方向は、ロボットのジョイント角度が(0,0,0,0,0,0)のときにロボット座標系と同じです。
- ‘TCP座標系’の座標軸(X、Y、Z) : フランジの端で装着するツールの端、又は作用点(Working Point)に設定します。このとき、‘フランジ座標系’を基準として‘TCP座標系’の回転角は下の1)~3)の順序に従って定義されます。
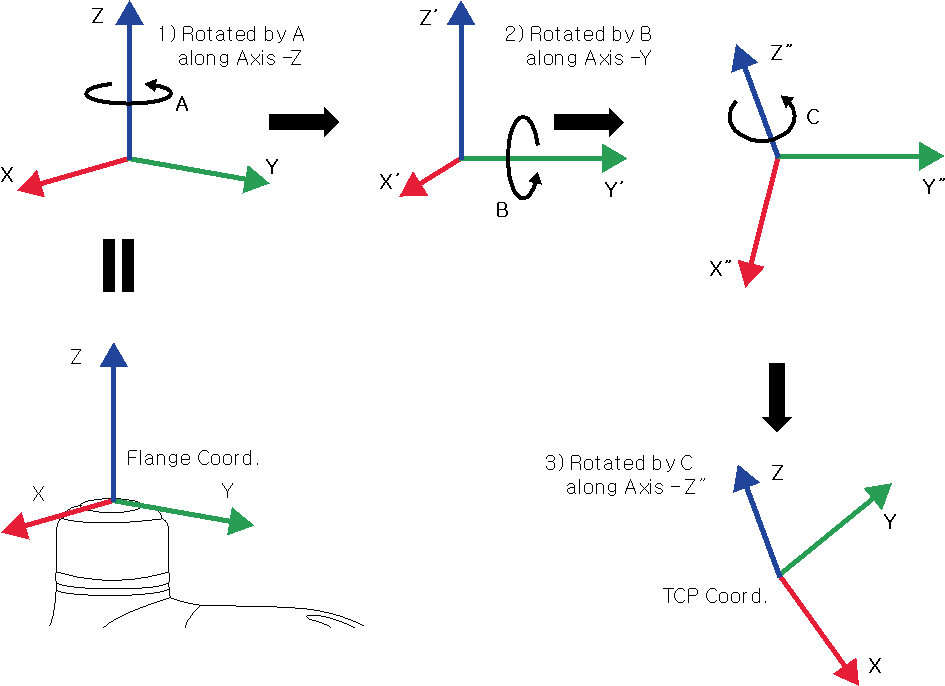
1) フランジ座標系のz軸に沿ってA度回転
2) 1)によって回転した座標系のy’軸に沿ってB度回転
3) 2)によって回転した座標系のz’’軸に沿ってC度回転
上の方法に従ってTCP値を設定するいくつかの例を挙げてみます。
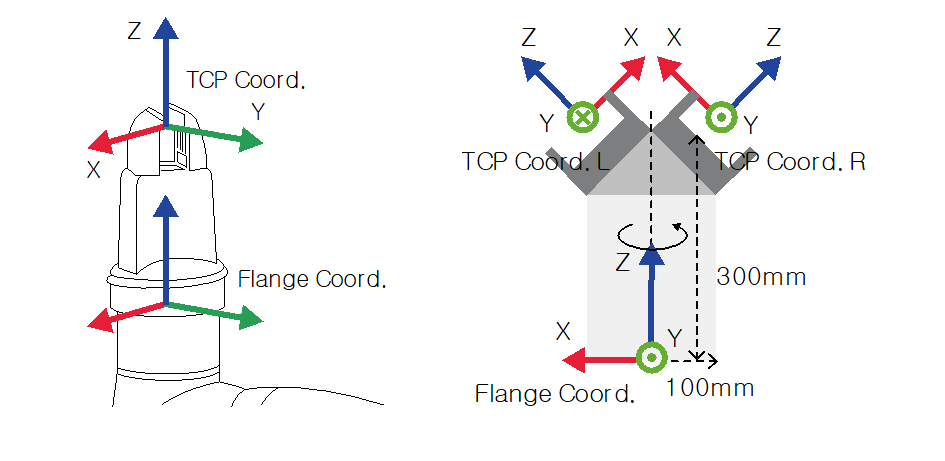
- [X, Y, Z, A, B, C] = [0, 0, 100, 0, 0, 0] : Z方向のオフセットのみある一般的なグリッパー(TCP Coord)
- [X, Y, Z, A, B, C] = [100, 0, 300, 180, -45, 0] : 45度の角度を持つ左側のグリッパー(TCP Coord.L)
- [X, Y, Z, A, B, C] = [-100, 0, 300, 0, -45, 0] : 45度の角度を持つ右側のグリッパー(TCP Coord.R)