
ユーザー座標系を設定する
作業対象を代表する座標系の設定ができます。この座標系をユーザー座標系といい、ロボットのベース、ワールド座標系とは区分されます。ベースまたはワールド座標系を基準としてユーザー座標系のポーズを設定でき、Task BuilderとTask Writerでロボットを利用してティーチングし動きを指定するときにも、ユーザー座標系を選択できます。ユーザー座標系を設定するには、ロボットワークセルで 
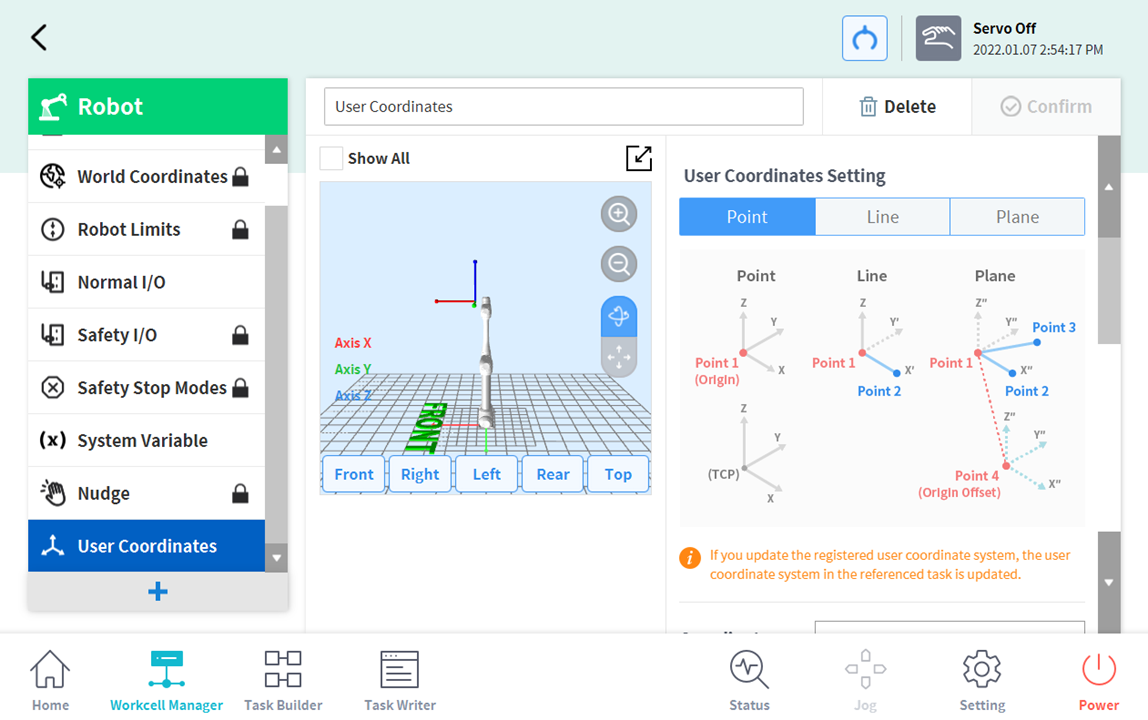
- 設定のために必要な値を入力してください。
- ユーザー座標系の説明画像と注意事項を必ずご参照ください。
- ユーザー座標系は、一点、二点、三点を基準に生成できます。
- 高級オプションでパレット座標を呼び出し、ユーザー座標系のポイントに適用することができます。