
ロボット制限値(Robot Limits)を設定する
安全監視機能の安全制限値(safety limits)を設定します。
メモ
- ロボットのラインナップによって安全設定値の制限(Limit)値と初期値は異なることがあります。
- 安全制限値は、安全定格監視機能が停止を開始する条件です。停止が完了したときの位置、外部に加わる力は、設定した安全制限値と異なることがあります。
ツール中心点/ロボット制限値(TCP/Robot Limits)
ツール中心点/ロボット制限値を設定するには、ロボットワークセルでロボット>ロボット制限値>ツール中心点/ロボットを選択してください。ツール中心点/ロボット制限値の設定画面は次のとおり構成されています。
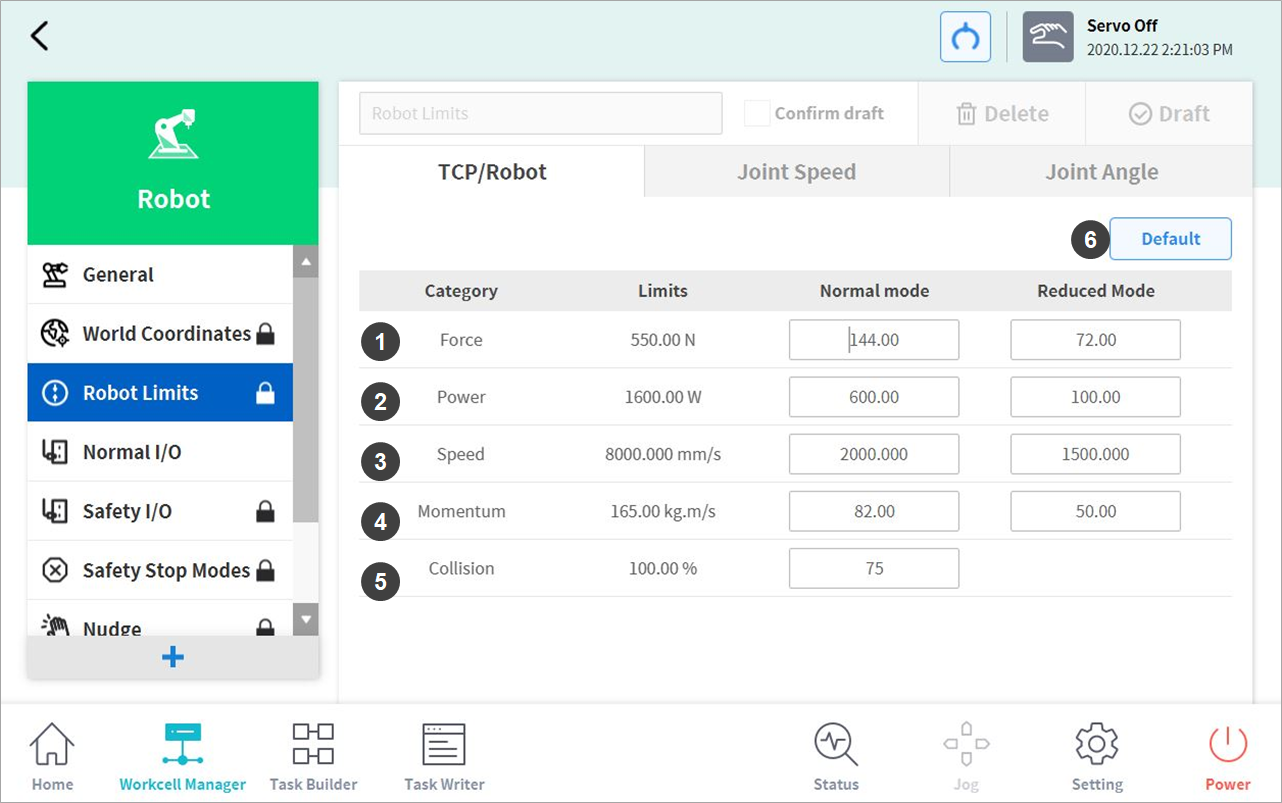
番号 | 項目 | 説明 |
1 | Force (N) | ツール中心位置(TCP)に適用する力の大きさを制限できます。 |
2 | Power (W) | ロボットの機械的動力の大きさを制限できます。 |
3 | Speed (mm/s) | ツール中心位置(TCP)の速力を制限できます。 |
4 | Momentum (kg.m/s) | ロボットのモーメンタムの大きさを制限できます。 |
5 | Collision (%) | 衝突感知の感度を設定できます。 |
6 | Default Value | ツール中心点/ロボット制限値の設定を基本値に変更します。 |
ジョイント角速度制限値(Joint Speed Limits)
ジョイント角速度制限値を設定するには、ロボットワークセルでロボット>ロボット制限値>ジョイント角速度を選択してください。ジョイント角速度制限値の設定画面は次のとおり構成されています。
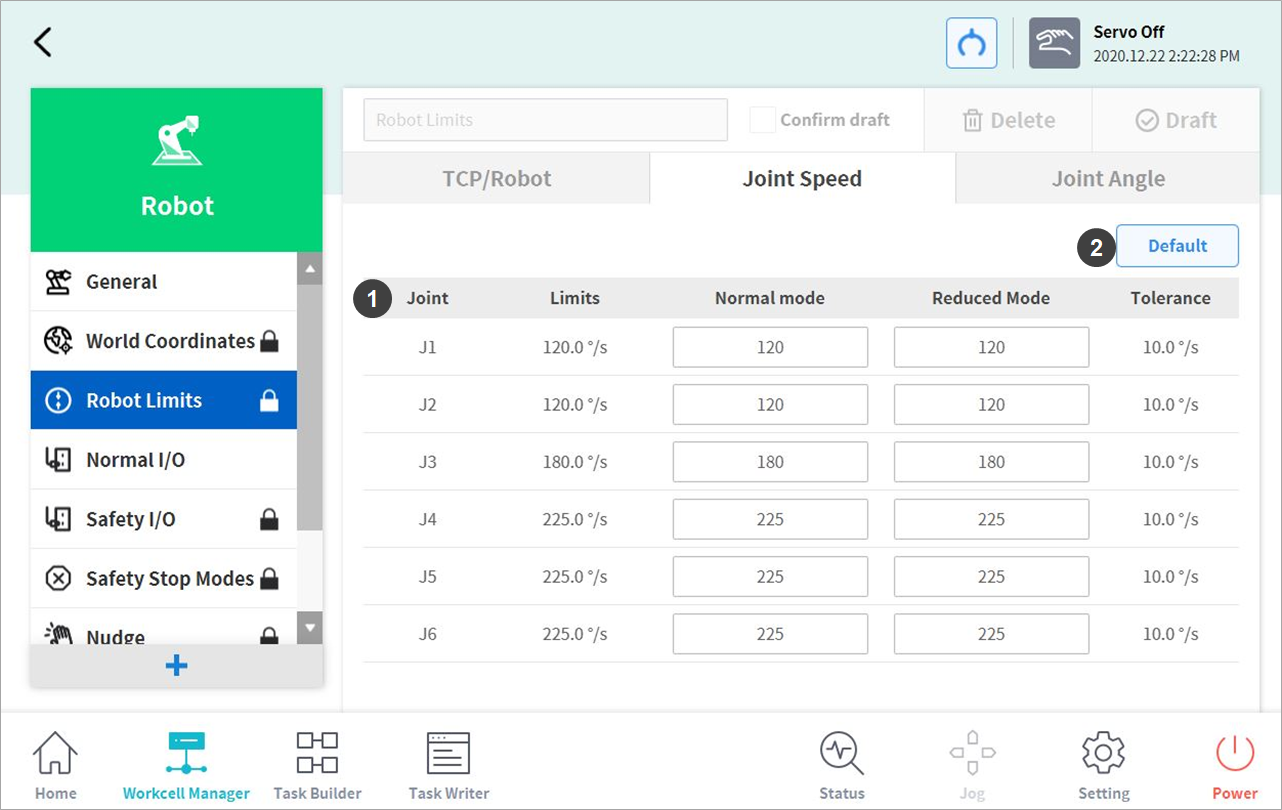
番号 | 項目 | 説明 |
1 | Joint Speed | 各関節の角速度を制限できます。 |
2 | Default Value | ジョイント角速度制限値の設定を基本値に変更します。 |
ジョイント角度制限値(Joint Angle Limits)
ジョイント角度制限値を設定するには、ロボットワークセルでロボット>ロボット制限値>ジョイント角度を選択してください。ジョイント角度制限値の設定画面は次のとおり構成されています。
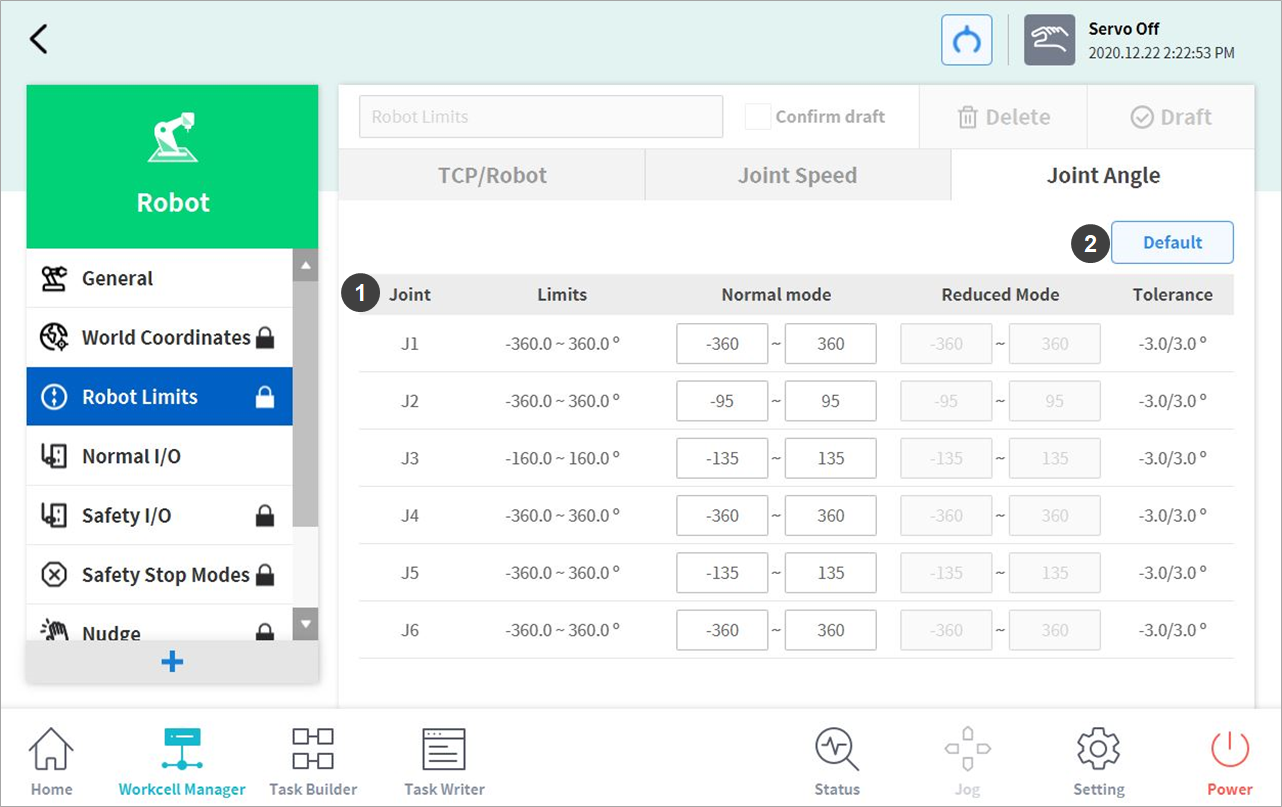
番号 | 項目 | 説明 |
1 | Angle Range of each Joint | 各関節の角度範囲を制限できます。 |
2 | Default Value | ジョイント角度制限値の設定を基本値に変更します。 |