
ナッジを設定する
協調作業区域内で安全停止モードSS2又はRS1によって停止した場合、Interrupted状態ではリセットすることができ、ナッジ入力によって作業を再開できます。ユーザー定義区域でナッジオプションを有効化して使うこともできます。
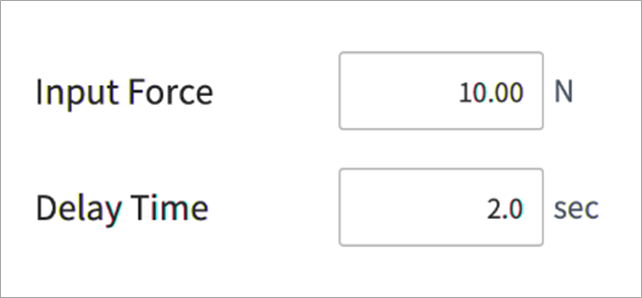
Nudgeを設定するには、ロボットワークセルでナッジのアイテムを選択してください。ナッジの入力で感知する力(ナッジ力)と、ナッジを認識してから作業再開までの待機時間(ディレイ時間)を追加で入力できます。ナッジの入力で感知する力は10.00~50.00Nの間です。
警告
- ナッジ機能は、リスク評価でこれを許可する場合にだけ使用してください。