衝突感度減少区域を設定する
衝突感知無効区域を設定するには、ロボットワークセルで 
- ワークセル設定画面上段のワークセル名入力画面に、登録しようとするワークセルの名前を入力してください。
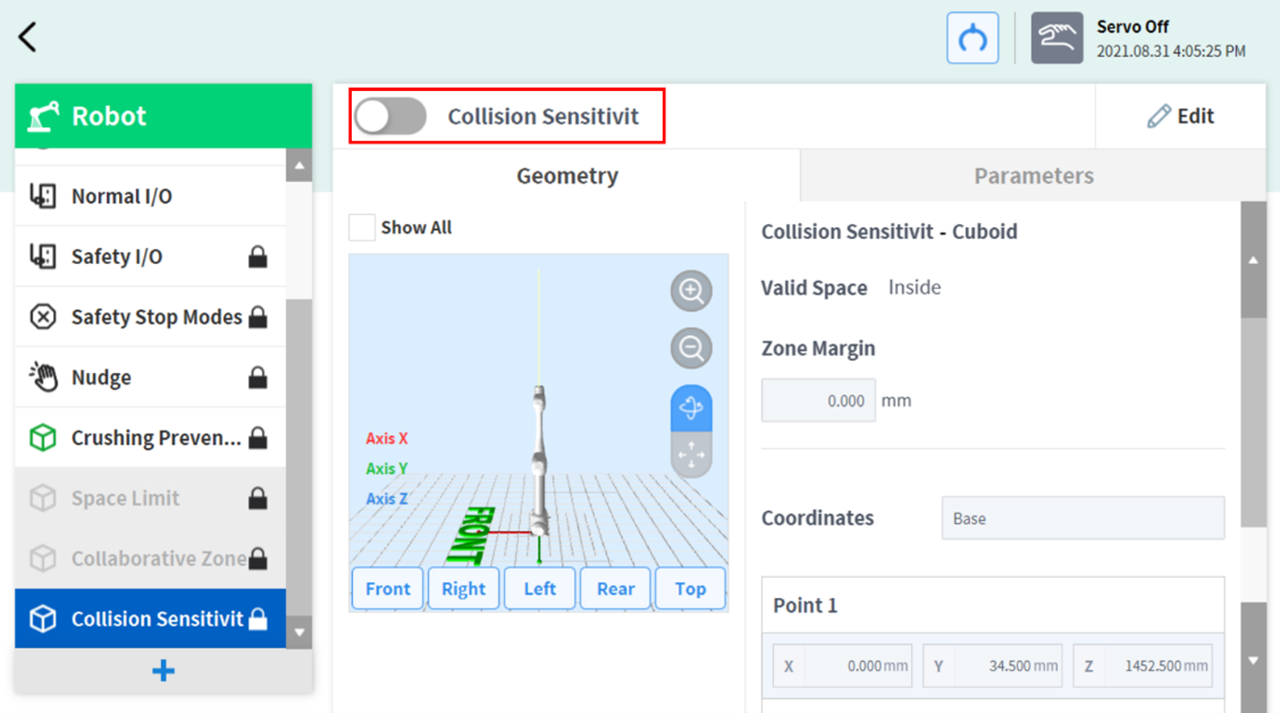
- 形(Geometry)タブで、区域(Zone)の形に基づくポーズ情報と有効スペース(Valid Space)、区域マージン(Zone Margin)を設定してください。
パラメータ(Parameters)タブでオーバーライドオプション(Override option)、ツール中心点/ロボット制限値(TCP/Robot Limits)、動的区域有効化(Dynamic Zone Enable)と指定区域の感知有効化(Desinated Zone Detection Enable)を設定後、臨時保存(Draft)ボタンを押してください。
警告
- 衝突感度減少区域は優先順位区域です。
- 優先順位区域が複数重なった場合、オーバーライドした安全制限値のうち最も緩和された制限値を基準に安全機能が作動します。安全のために、優先順位区域は出来る限り最小サイズで指定する必要があります。
- 表示されたすべてのパラメータ値が設定しようとする値と一致することを確認後、臨時保存確定(Confirm draft)を選択し、確認(Confirm)を押してください。
- 有効化トグルボタンを押して衝突感度減少区域を適用させてください。