
ロボットの設置ポーズを設定する
ロボットはあらゆる角度で設置できます。ロボットの設置ポーズを設定するには、ロボットワークセルで 
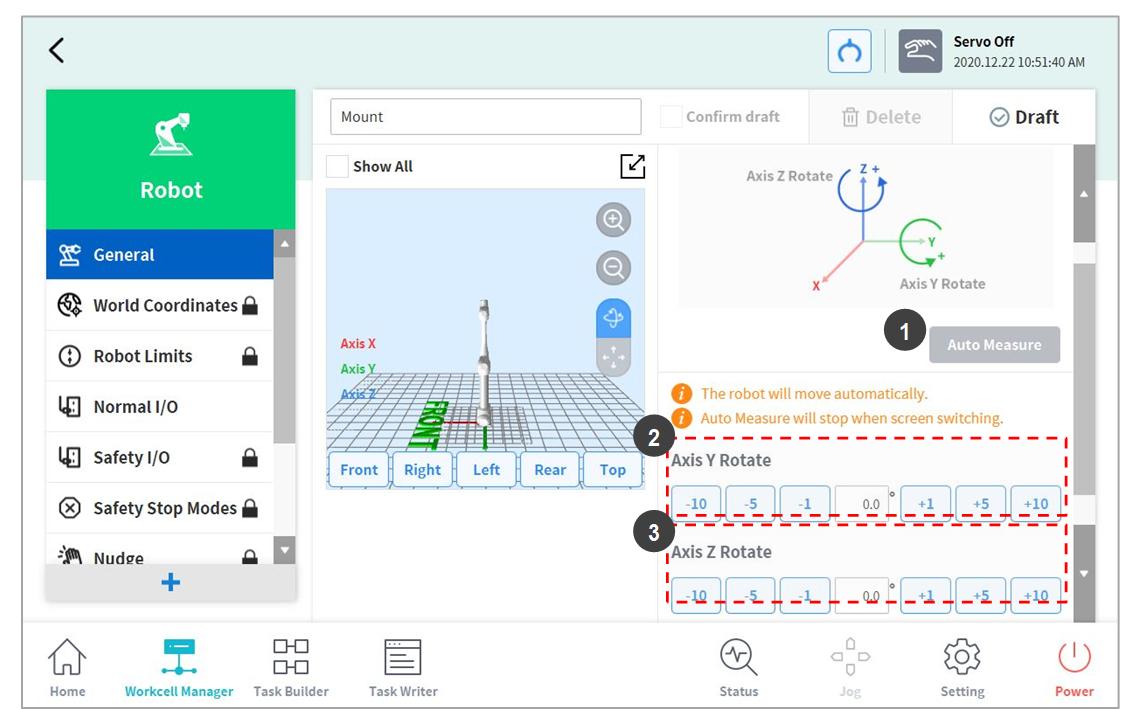
番号 | 項目 | 説明 |
|---|---|---|
1 | Auto Calculate | ロボットの設置角度を自動的に計算します。 |
2 | Y-axis Rotation Setting | 設置時のロボットのY軸角度を入力します。 |
3 | Z-axis Rotation Setting | 設置時のロボットのZ軸角度を入力します。 |
メモ
傾きを自動で計算するには、Auto Calculate ボタンをタップしてください。設置ポーズの自動計算機能は、ロボットのベースが地面と5度以上傾いた状態で使用することができます。ロボットの設置ポーズに対する自動計算機能を使用すると、設置角度に関する正確な値を入力しなくてもダイレクトティーチング、力制御、順応制御機能に必要な設置ポーズの設定を簡単に行えますが、自動計算によるロボットポーズの設置は、正確な測定値を入力するのに比べロボットの絶対位置の正確度が欠けることがあります。
注意
H Seriesモデルは、ロボットの設置ポーズ機能に対応していません。常に地面に設置するようにしてください。