
各部の名称と機能
マニピュレーター
各部の名称
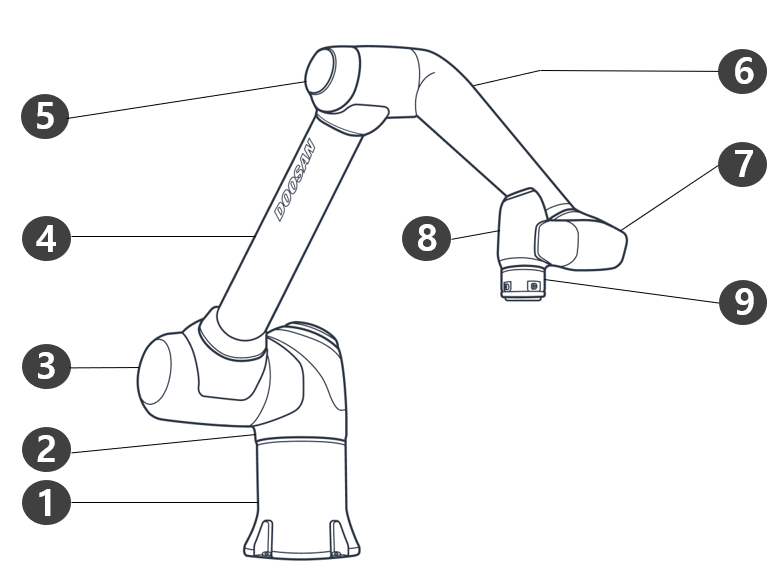
番号. | 名前 | 番号. | 名前 |
|---|---|---|---|
1 | Base | 6 | Link2 |
2 | J1 | 7 | J5 |
3 | J2 | 8 | J6 |
4 | Link1 | 9 | Tool Flange |
5 | J3 | 10 |
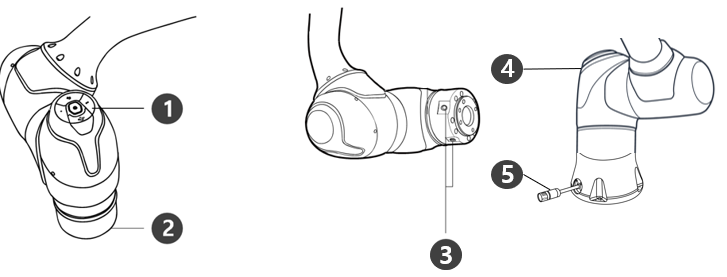
主な機能
番号 | 項目 | 説明 |
|---|---|---|
1 | Cockpit | [オプション] ダイレクトティーチングと運用のための動作ボタンです。 |
2 | Tool flange | ツールを装着する部位です。 |
| 3 | Flange I/O | ツール制御のための入出力ポートです。 (デジタル入力 3ch、出力 3ch) |
4 | LED | ロボットの状態をさまざまな色で表示します。 ロボットの状態の詳細については、モード別の状態とロボットLEDのカラー を参照してください。 |
5 | Connector | ロボットの電源印加と通信に使用されます。 |
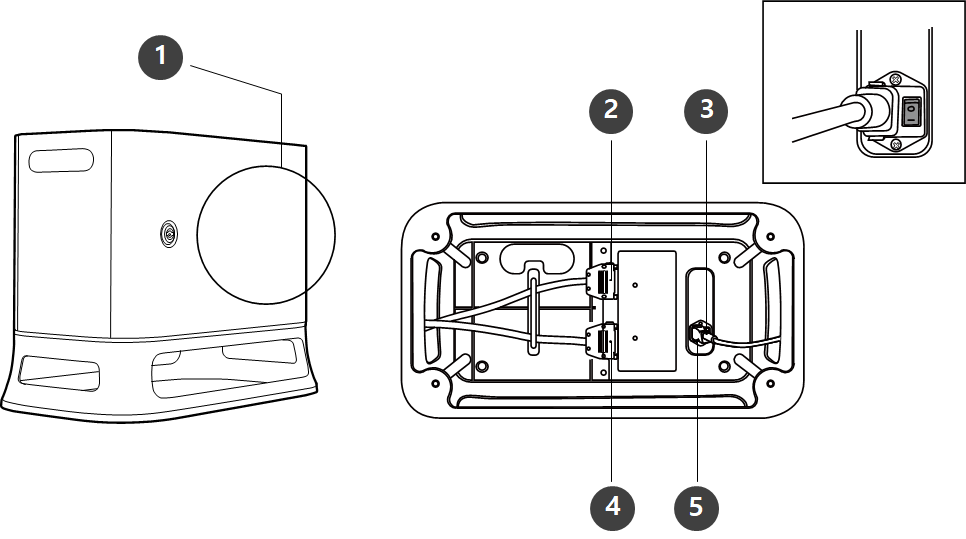
コントローラー
番号 | 項目 | 説明 |
|---|---|---|
1 | I/O connection terminal (internal) | 別のロボットのコントローラーや周辺機器とつなぐことができます。 |
2 | Teach pendant cable connection terminal | ティーチペンダントのケーブルをコントローラーとつなぎます。 |
3 | Power switch | コントローラーの主電源を入れたり切ったりできます。 |
4 | Manipulator cable | マニピュレーターとコントローラーを接続します。 |
5 | Power connection terminal | コントローラーの電源をつなぎます。 |
メモ
オプションコントローラーを選択した場合、付録の取扱説明書を確認して接続、ご使用ください。