スキル - サンプルを選んで配置してみてください
オプション 標準( NORMAL ) 20 分
このサンプルは Task Builder で作成されますTask Writer は、スキル機能をサポートしていません。
注意
サンプルを試す前に、必ず読み、それに従って 使用時の注意事項ください。詳細については、を参照 パート 1 :安全マニュアルしてください。
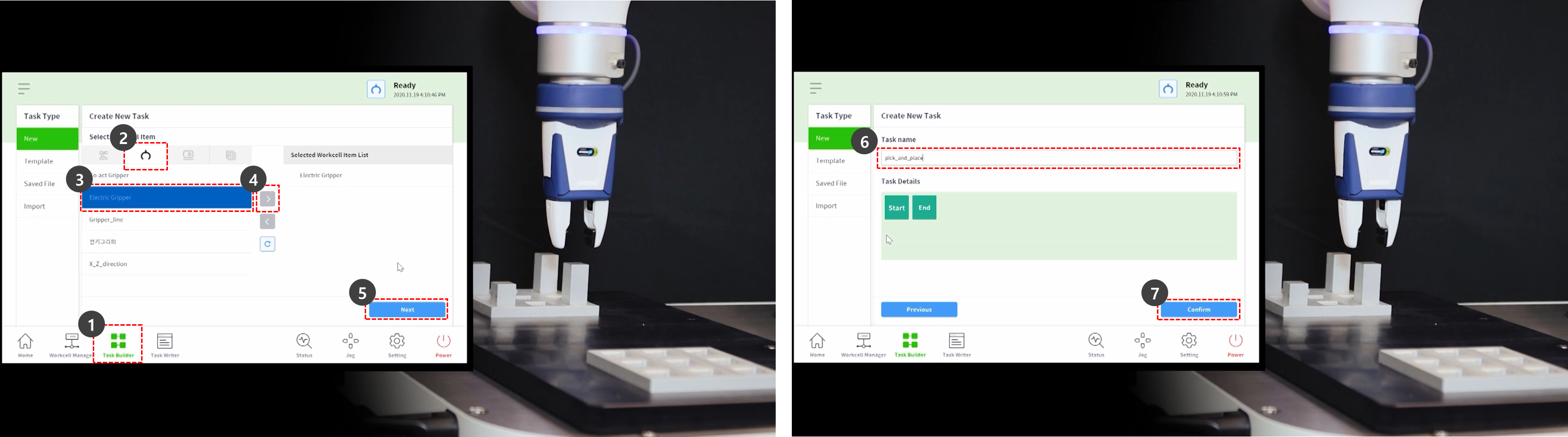
下部のメニューから [ タスクビルダ ] を選択します。
ワークセルアイテムを選択 > グリッパーアイコンを選択します
ワークセル項目として登録されているグリッパーを選択します。ワークセル項目として登録されているグリッパーがない場合、このサンプルは試行できません。
[>] ボタンを押して、選択したワークセル項目としてワークセル項目を登録します。
[Next]( 次へ ) ボタンを押します。
タスク名を入力します。
確認を押します。
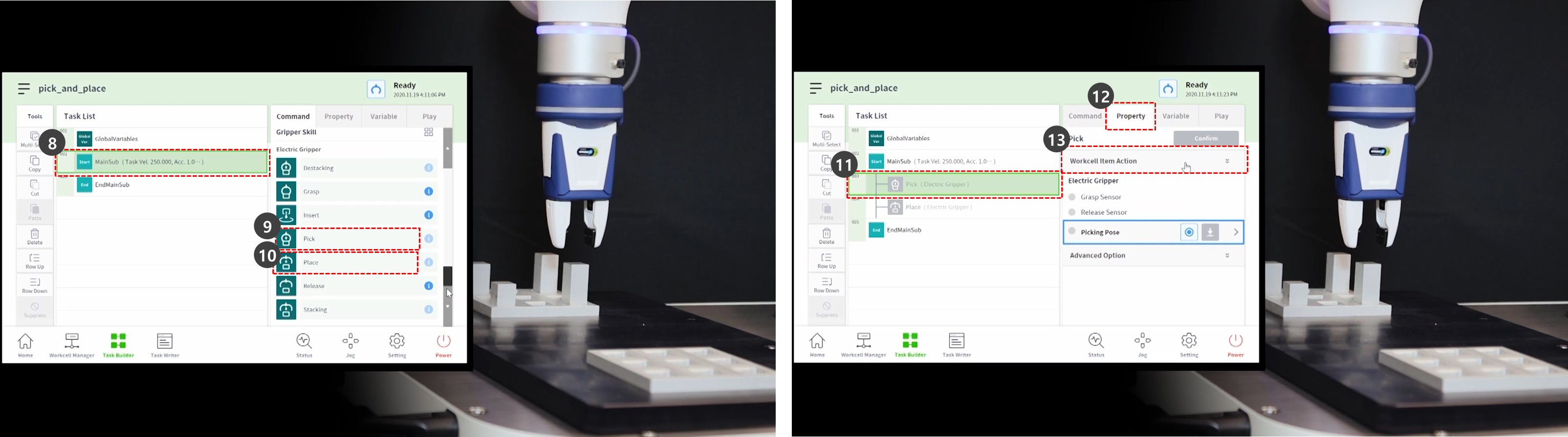
タスクリストの 2 行目から MainSub コマンドを選択します。選択した行の次の行に新しいコマンドが追加されます。
ピックスキルコマンドを追加します。
Place skill コマンドを追加します。
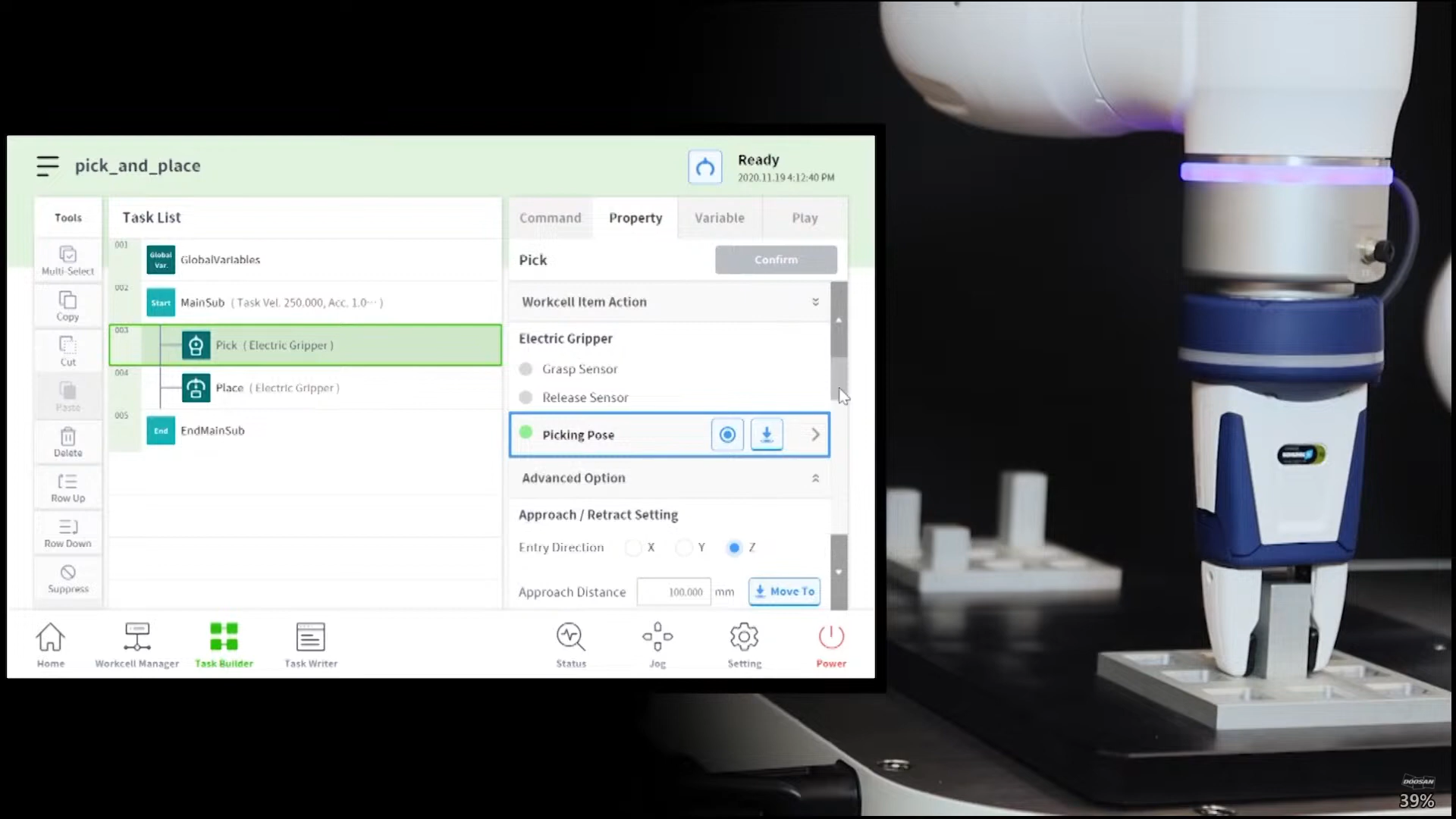
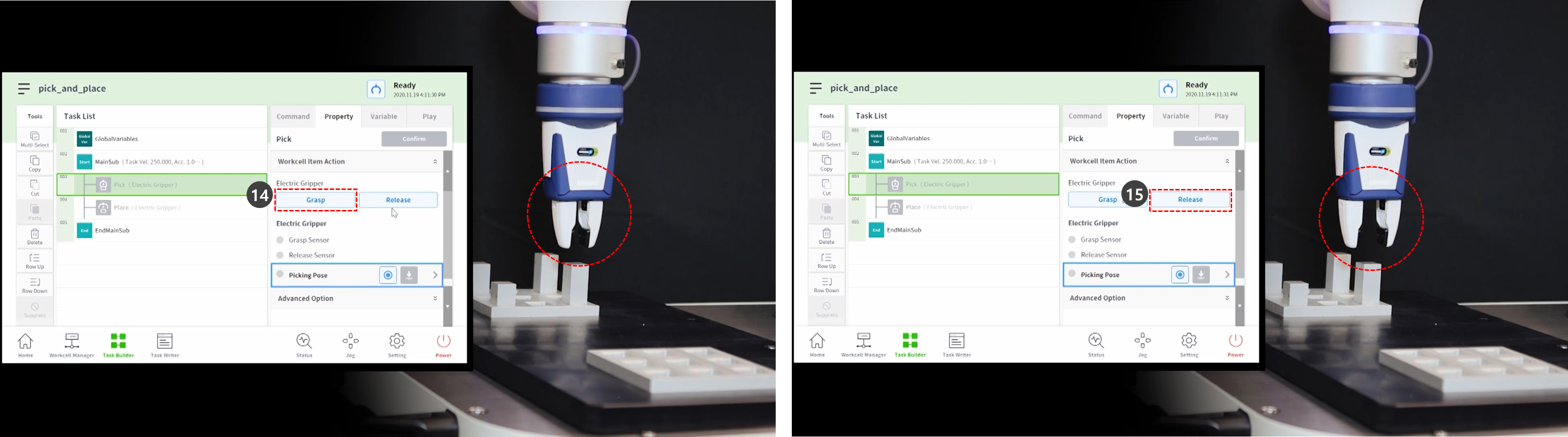
タスクリストの 3 行目から [ ピック( Pick ) ] コマンドを選択します。
[ プロパティ ] タブを選択します。
ワークセル項目アクションを押して、メニューを展開します。グリッパーワークセル項目が選択されている場合、ワークセル項目アクション中にグリッパーアクションをテストできます。
グリッパーをテストするには、 [ つかむ( Grasp ) ] ボタンを押して、つかむ動作を実行します。
グリッパーをテストするには、リリースボタンを押してリリース動作を実行します。
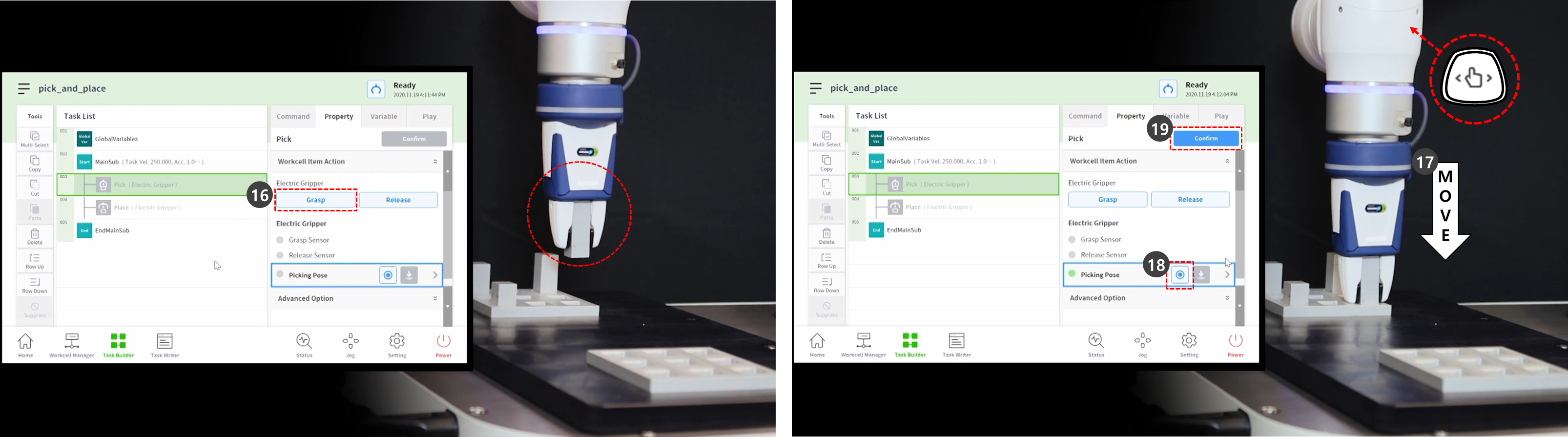
軽い部材の場合は、グリッパーに部材を置き、 [ つかむ( Grasp ) ] ボタンを押してロボットが部材を保持するようにします。グリッパーがワークピースを保持している間にティーチングを行うと、正確な位置を確立できます。
ただし、ティーチング中にロボットがワークピースを保持することは必須ではありませんが、例です。
重いワークピースの場合、グリッパーがワークピースを失う可能性があるため、危険な状況が発生する可能性があります。
重いワークピースの場合、 [ ツール設定 ] の [ ツールの重量 ] には、ツールの重量とワークピースの重量が含まれている必要があります。
ダイレクトティーチングを使用して、ピックが実行されるポイントにロボットを移動します。
コックピットのハンドガイドボタンを押したままにして、ロボットを移動します。
[ ピックポーズ( Picking Pose ) ] の [ ポーズを取得( Get Pose ) ] ボタンを押します。
確認ボタンを押します。
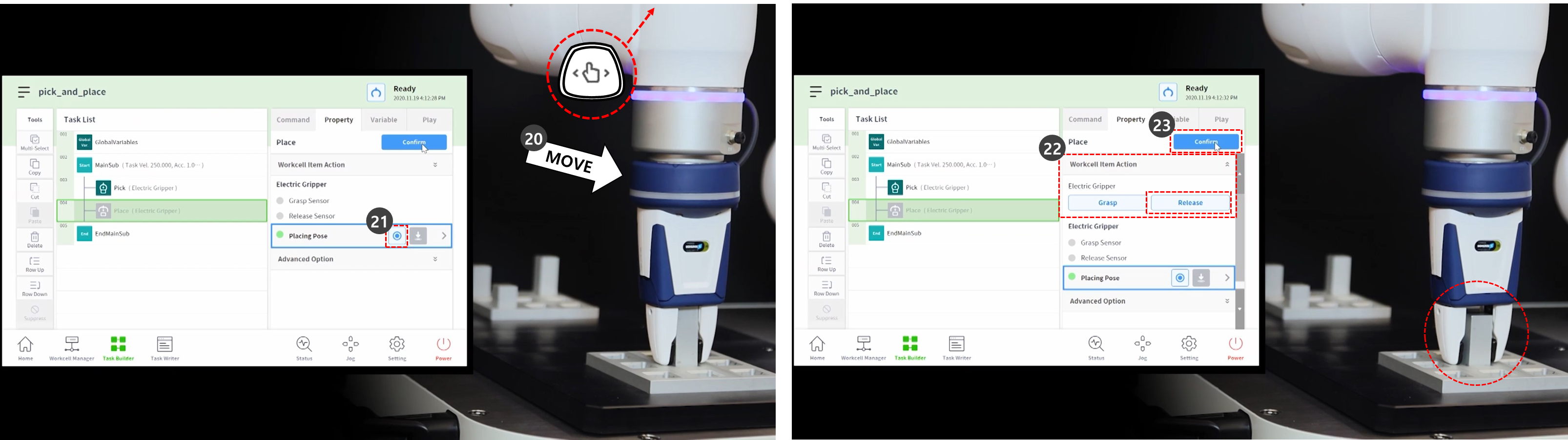
直接指導を使用して、ロボットを場所が実行される場所に移動します。
配置ポーズの Get Pose ボタンを押します。
グリッパーから部材を外すには、リリースボタンを押します。
確認ボタンを押します。
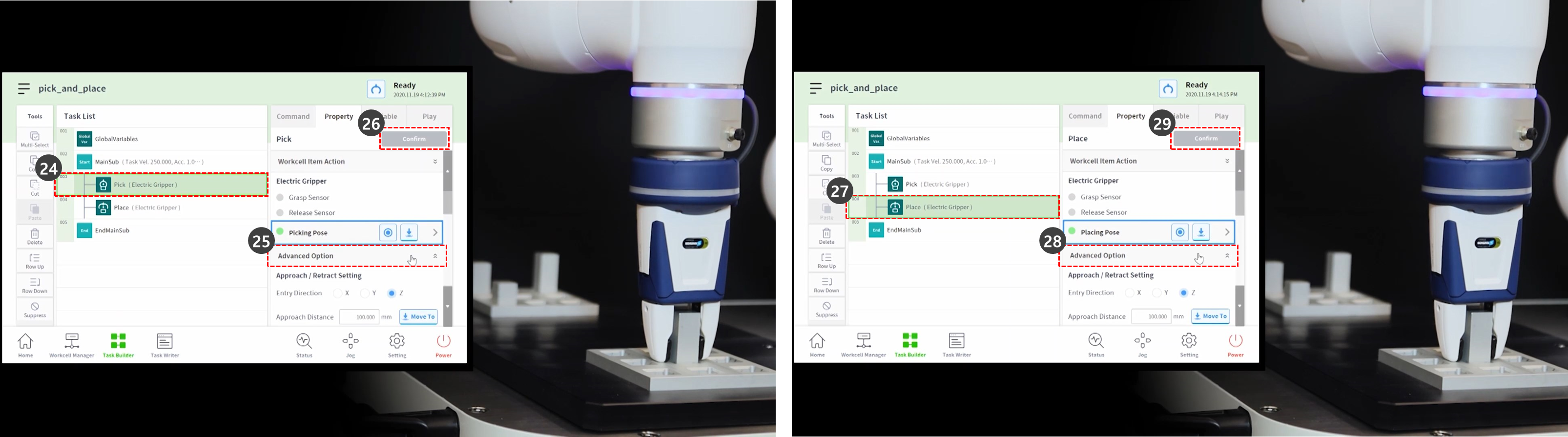
[ ピック( Pick ) ] および [ 配置( Place ) ] スキルコマンドの詳細設定を行うに は、タスクリストの 3 行目で [ ピック( Pick ) ] コマンドを選択します。
[Advanced] オプションを押してメニューを展開し、次のように設定します。以下で説明しない項目にはデフォルト値を使用します。
入力方向:Z 軸
ピック位置に入る方向を設定します。
アプローチ距離:100 mm
ロボットがピック位置に近づく直前の距離を設定します。十分なアプローチ距離を確保します。
リトラクト距離:100 mm
ロボットがピック位置から設定方向にリトラクトした後の距離を設定します。十分なリトラクト距離を確保します。
アプローチ速度:100 mm/s
ロボットがオブジェクトに近づくと、アプローチ速度がデフォルト値よりも低く設定されます。
コンプライアンス管理:有効(緑)
検出接点:有効(緑)
コンプライアンス管理機能とコンタクト検出機能を有効にします。
接触力:10N
接触公差:10 mm
力:15N
スクラッチオフセット:2mm
ピッキング前にグリッパーを解除:有効(緑)
ピック位置に近づく前に、グリッパーをリリースステートに設定します。
工具重量:なし
ワークピースが軽量でない場合は、ワークピースの重量と工具の重量を合計し、 [ 工具重量ワークセル項目( Tool Weight Workcell Item ) ] として追加し、選択する必要があります。
確認ボタンを押します。
タスクリストの 4 行目から [ 配置( Place ) ] コマンドを選択します。
[Advanced] オプションを押してメニューを展開し、次のように設定します。以下で説明しない項目にはデフォルト値を使用します。
入力方向:Z 軸
アプローチ距離:100 mm
リトラクト距離:100 mm
アプローチ速度:100 mm/s
コンプライアンス管理:有効(緑)
検出接点:有効(緑)
コンプライアンス管理機能とコンタクト検出機能を有効にします。
接触力:10N
接触公差:10 mm
力:15N
工具重量:なし
確認ボタンを押します。
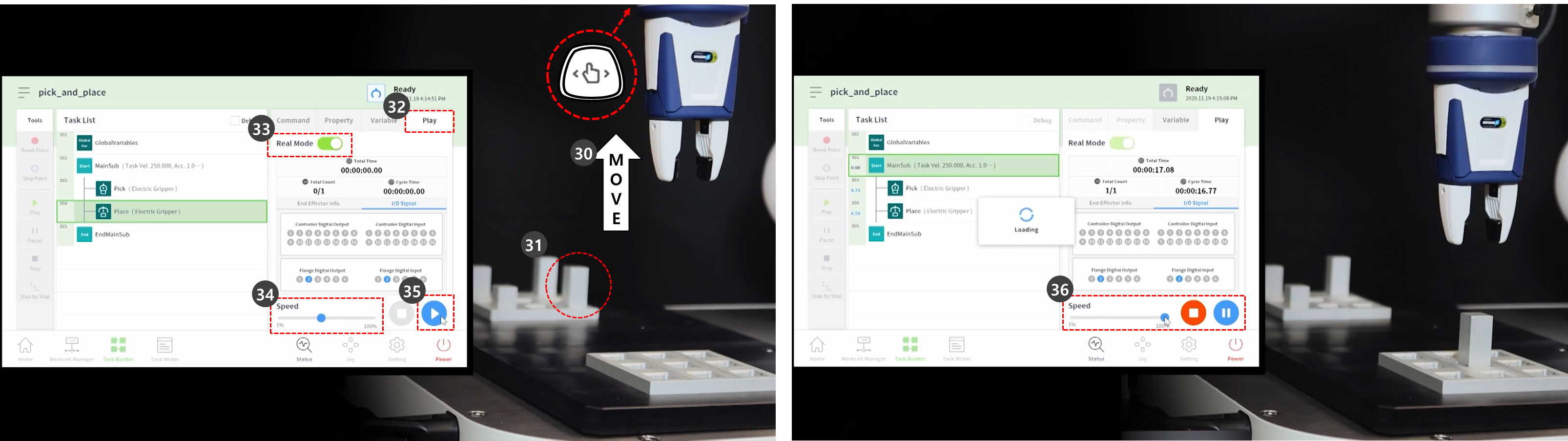
ダイレクトティーチングを使用して、ピック & プレースが開始するポイントにロボットを移動します。
ワークピースをピック位置に移動します
[ 再生( Play ) ] タブを選択する。
リアルモードトグルボタンを有効にします。
速度スライドバーを 10 ~ 30% に調整します。
この速度スライドバーは、すべてのコマンドの設定速度を選択した % に調整します。
作成後に初めてタスクを実行する場合は、低速で実行すると、予期しないリスクが発生する可能性があります。
再生ボタンを押します。
問題なくタスクが完了した場合は、速度をデフォルトの 100% に戻し、もう一度テストします。