
ウェイポイントの設定
命令語のウェイポイント(waypoint)を設定するには:
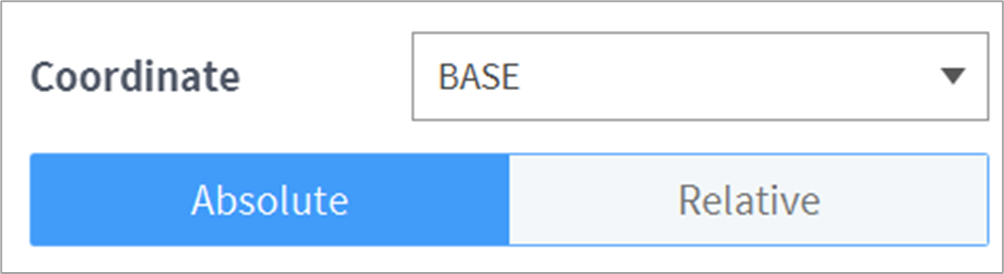
- 基準座標系と座標値のタイプ(Absolute、Relative)を選択します。
- ジョグ機能を利用するかダイレクトティーチングして、設定する位置にロボットを移動させます。
- Save Poseボタンをタップして、ロボットツールの位置を保存してください。
- 必要な場合、GlobalVariablesやDefine命令語で定義しておいた変数を指定できます。
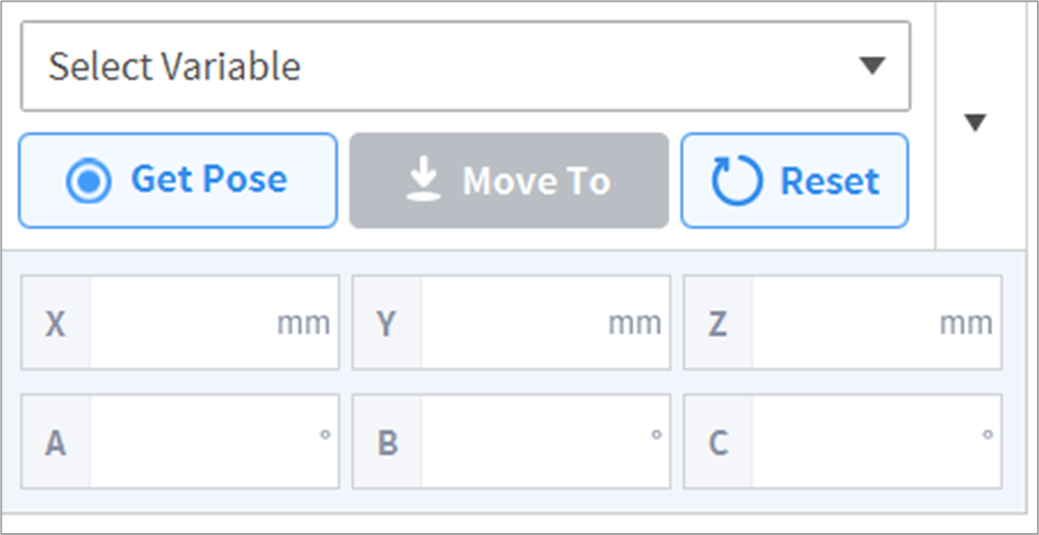
- 必要な場合、GlobalVariablesやDefine命令語で定義しておいた変数を指定できます。
注意
- 投影ポーズは、入力された座標値を 5 自由度ロボットで移動できる座標値に変換します。
- 投影ポーズ ボタンは P シリーズ モデルでのみサポートされています。