システムブーティング
電源が入るとシステムブーティングが始まります。ブーティングが完了すると、システム運用プログラムがティーチペンダントの画面に現れます。システム運用プログラムについての詳細は、“ プログラム画面の構成”を参照してください。
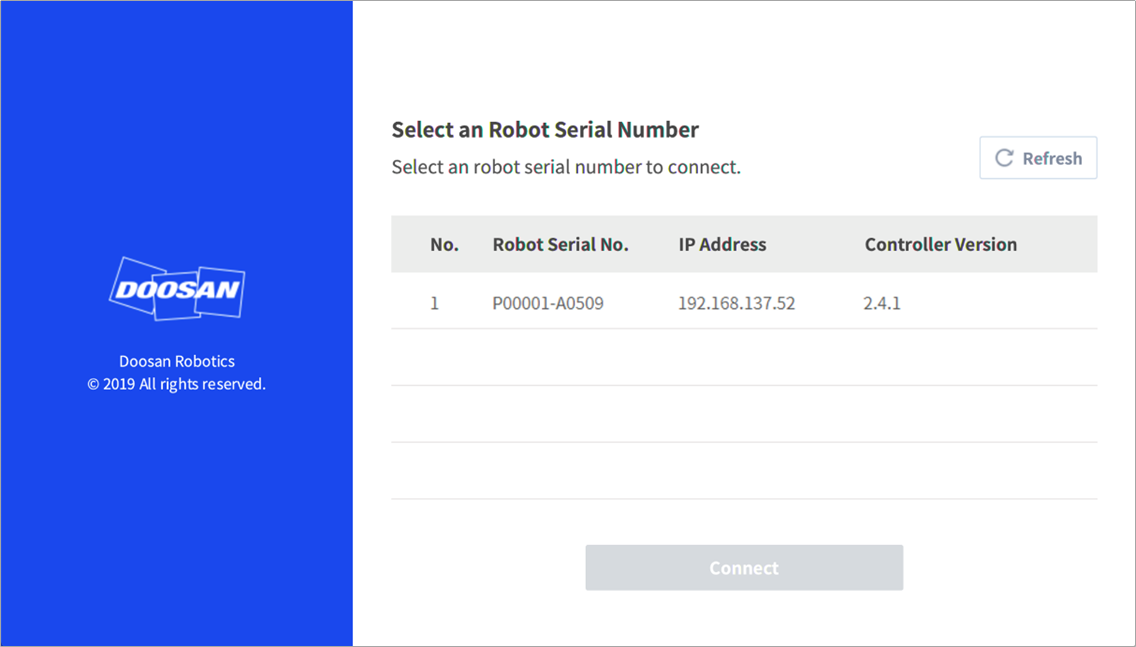
DART-Platform(Windows用)の場合、
- デスクトップまたはラップトップにインストールされている DART プラットフォームを実行します。
- ロボットコントローラの起動が完了するまで約 5 分間待ちます。
- IP が検索されたら、ネットワークに接続されている のシリアル番号を確認します。
- 接続するロボットを選択し、[接続] ボタンをクリックします。
- Force Recall ボタンを押してコントロールを転送します。

メモ
- コントローラと DART-Platform が接続されていない場合は、DART-Platform がインストールされているデスクトップまたはラップトップの IP アドレスとデフォルト ゲートウェイの C クラス バンドをコントローラの IP アドレスの C クラス バンドに変更し、再試行します。
- IP が検索されない場合は、[コントローラー IP を手動で入力する] を選択し、接続を続行します。 コントローラーのデフォルトの IP アドレスは 192.168.137.100 に設定されています。
- コントロールの強制撤回が引き続き失敗する場合は、次のことを確認してください。
- プログラムを閉じて再起動します。
- 非常停止ボタンが押されていないことを確認します。
- コントローラのデジタル入力の 1 つまたは複数のペアが、安全 I/O 設定で緊急停止 / リモート緊急停止 / STO 信号 (アクティブ LOW) に指定されている場合は、指定されたすべての信号が無効になっていることを確認します ( 高い)。
- コントローラの起動が完了したかどうかを確認します。
- ロボットの状態を確認します。 リモート コントロール、リカバリ、またはバックドライブの場合、DART プラットフォームの実行に失敗することがあります。
メモ
- サーボオン(Servo On): ロボットのポーズを移動するためには、ロボットのジョイントに電源が入り、ロボットの状態が待機状態に切り替わるサーボオン状態にならなければなりません。サーボオンについての詳細は、" Servo On"を参照してください。
- 日付と時間の設定:ティーチペンダントに表示される日付及び時間とロボットに保存されるログメッセージは、システム運用プログラムに設定された日付と時間を基準として表示されるため、最初のブーティング後に日付と時間を設定しなければなりません。日付と時間を設定する方法は、“ 日付と時間を設定する”を参照してください。
- DART Platformを使えば、ティーチペンダントなしでもロボットの制御ができます。
- DART Platformの場合、ブーティングが完了すればネットワークに接続されているロボットを表示する画面が現れ、この画面で接続したいロボットのシリアル番号を確認して接続することになります。