パッケージポーズを外します
必須 簡単 3 分
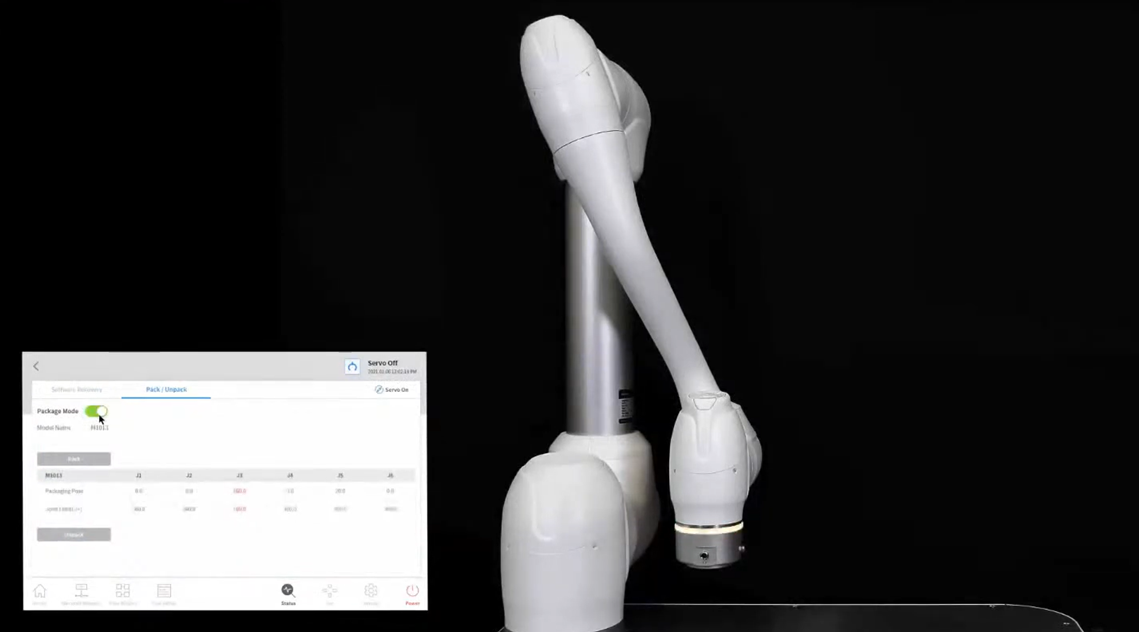
搬送やパッケージングを容易にするため、ロボットはパッケージに入れられています。ロボットを使用するには、パッケージポーズを解除する必要があります。ロボットは、ポーズをパッケージングするときにジョイント角度制限を超えるポーズを保持するため、安全制限違反のためにサーボを状態に設定することはできません。この状態では、ロボット LED が赤色に点灯します。
注
再配置のためにロボットをパッケージ化する必要がある場合は、パッケージモードでパッケージポーズを使用して移動を使用してパッケージポーズを設定します。
パッケージポーズをリリースするプロセスは次のとおりです。
- ティーチペンダントの初期画面でステータスをタップ します。
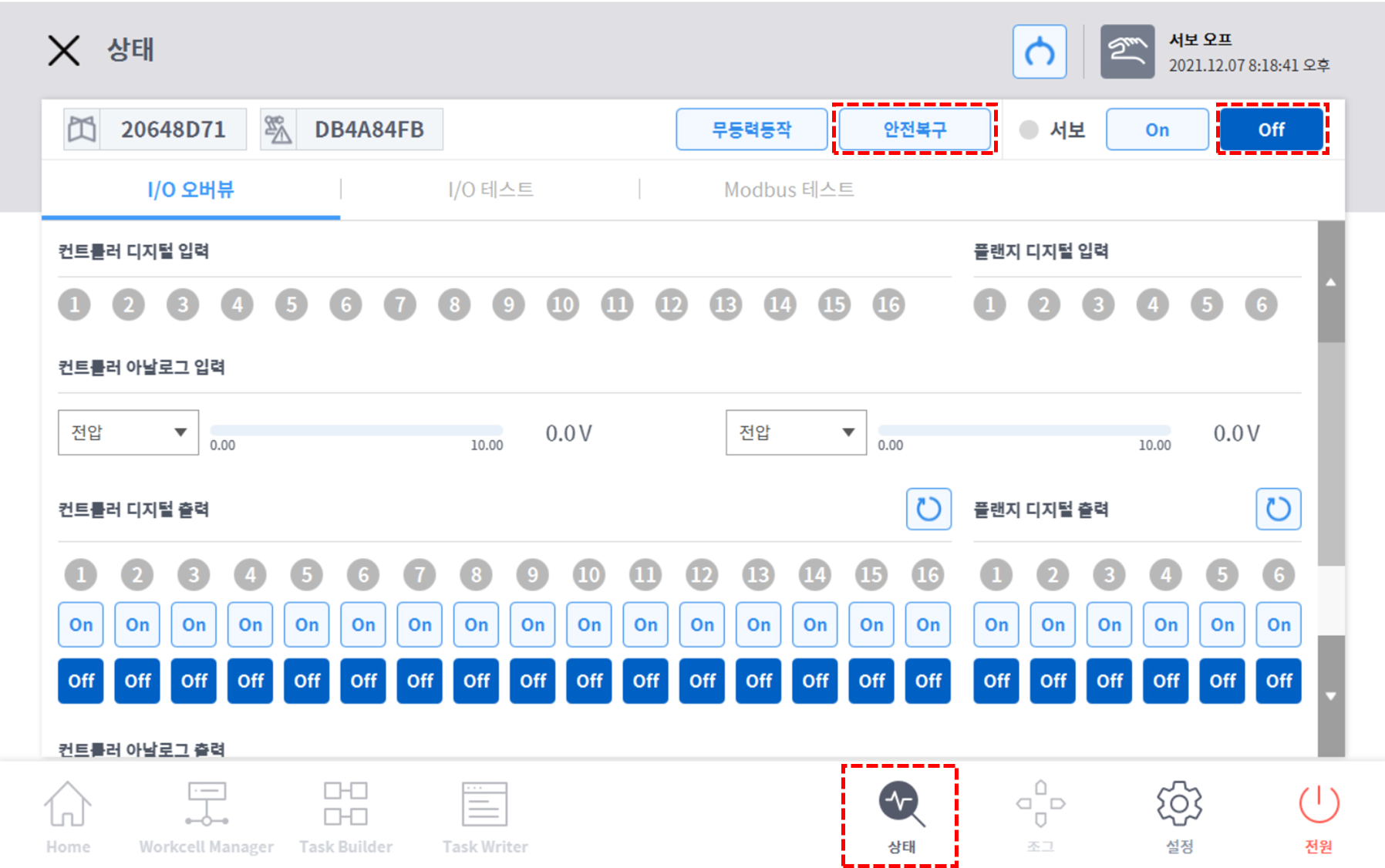
- Safety Recovery ( 安全リカバリ ) ボタンをタップ します。安全回復 ボタンは、サーボオフ状態のときに有効 になります。
- パッケージングモード( Packaging Mode )タブを選択 します。
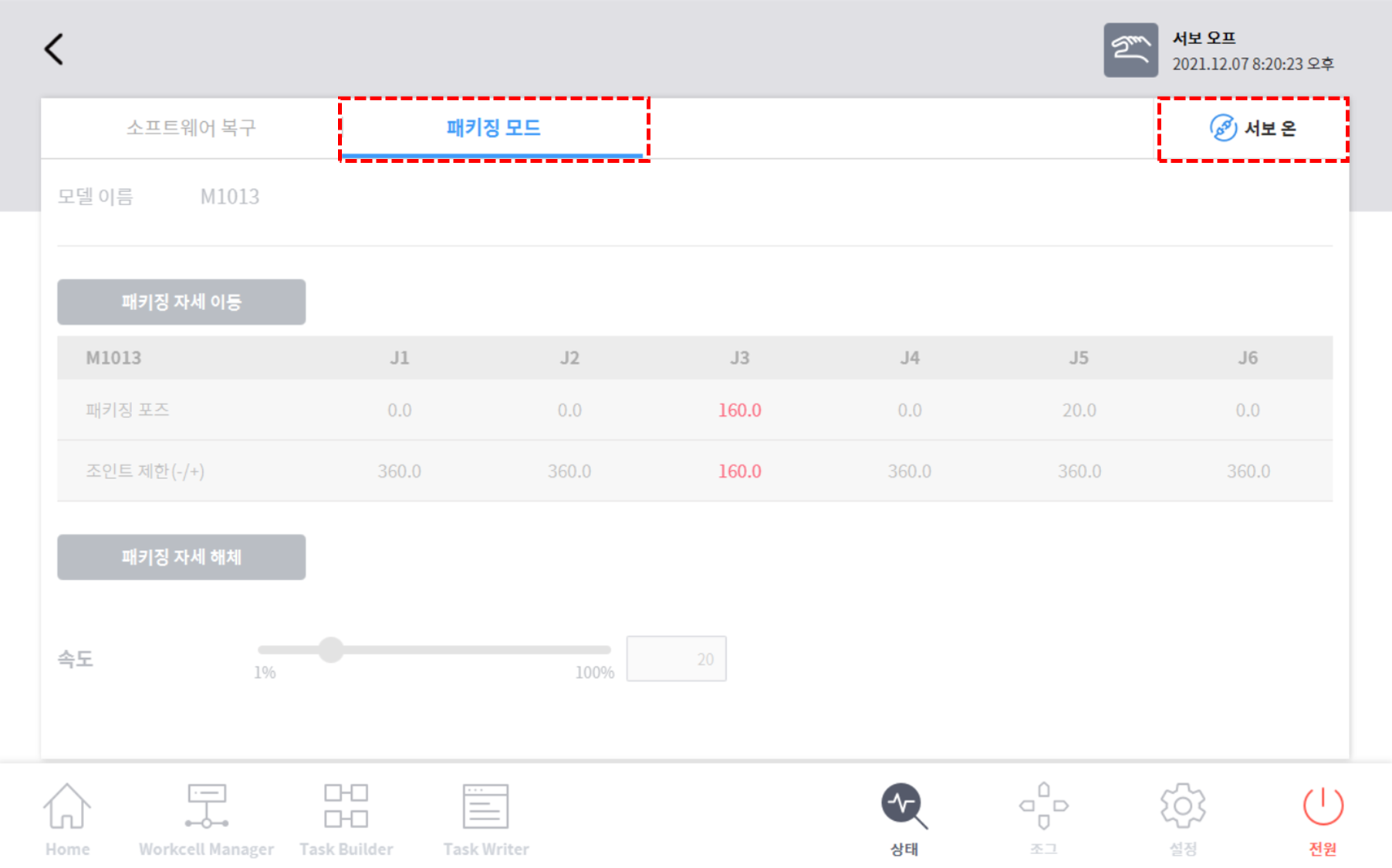
- サーボオンボタンをタップ します。
- ティーチペンダント画面の右下にあるロボットステータス表示が、安全停止から復旧スタンバイに変わり ます。Packaging Mode タブの Packaging Mode トグルボタンをタップ します。
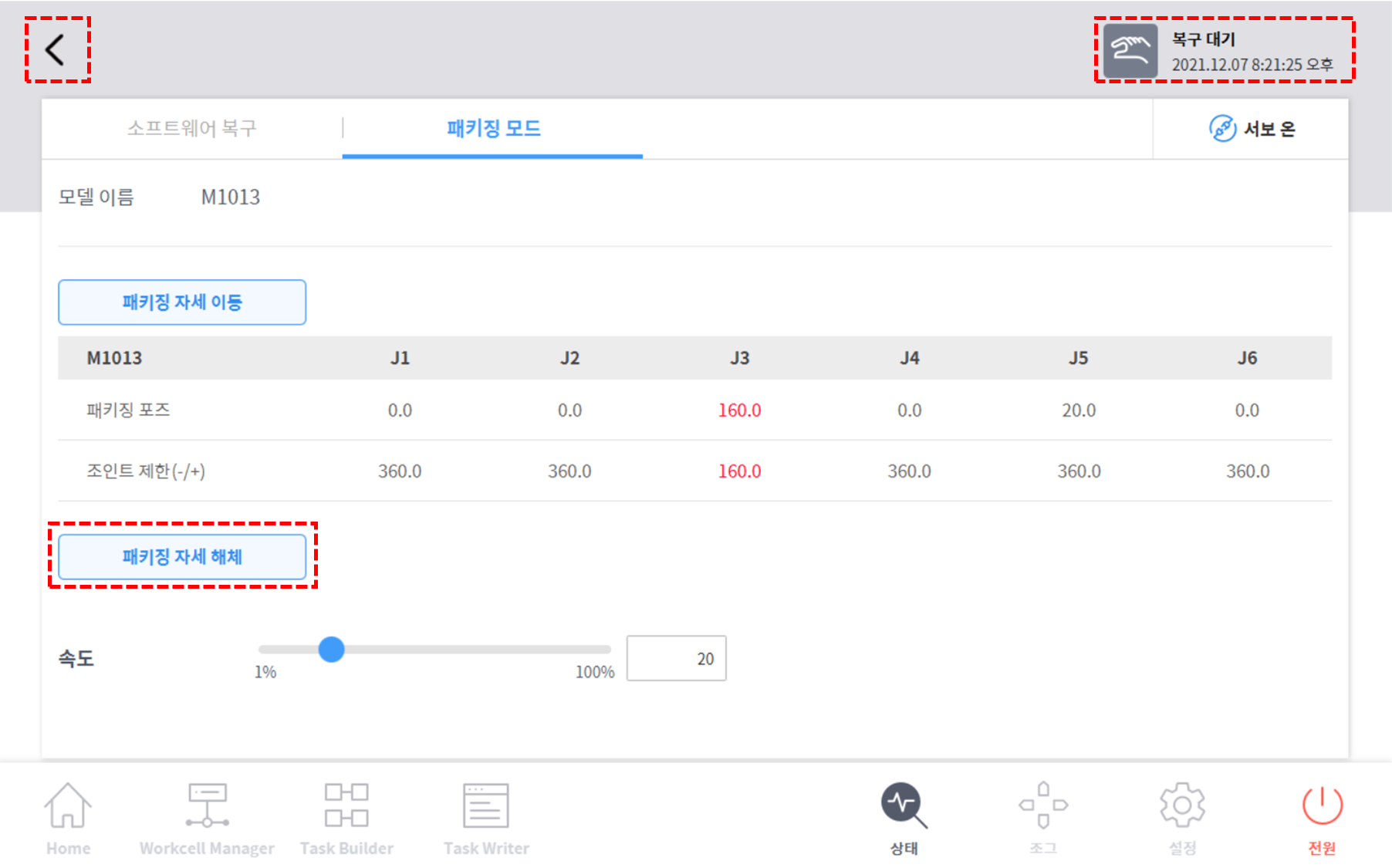
- [ パッケージポーズの解除 ] ボタンを押したままに します。ロボットのパッケージングモードが解除され、ロボットがホームポジションに移動します。ロボットがホームポジションにある場合、それ以上移動しません。
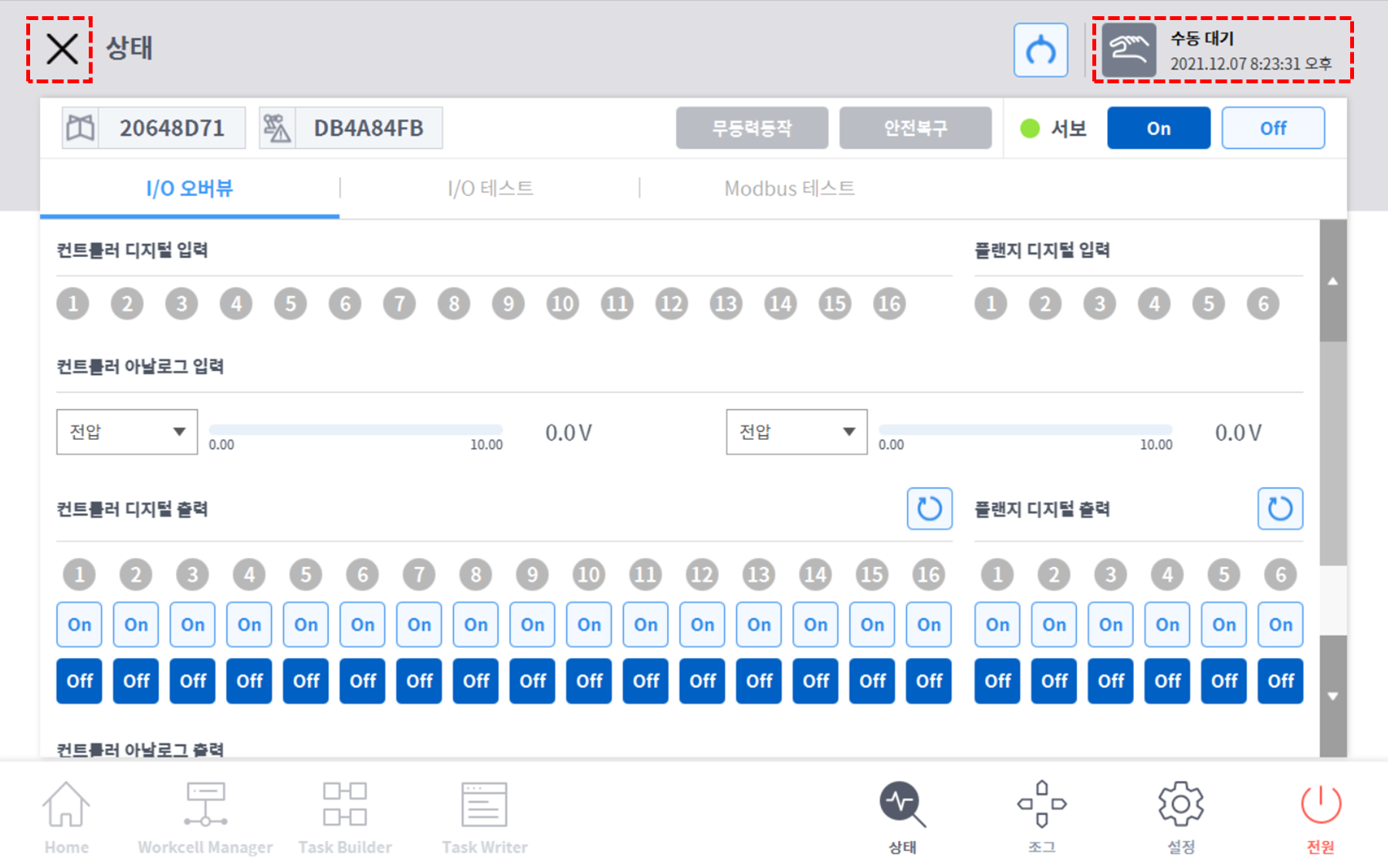
- ロボットがホームポジションになったら、画面左上のボタンをタップ

- ティーチペンダントの右下にあるロボットのステータス表示が、 [ リカバリスタンバイ ] から [ 手動スタンバイ ] に変わり ます。これで、ロボットはユーザーが操作できる状態になります。ステータス画面の閉じるボタンを押し