
バックドライブモードを使用する
バックドライブとはモーター駆動電源を遮断した状態で、ブレーキだけを解除して外力によってロボットのジョイントを動かすことができます。安全リカバリーモードやハンドガイディングでロボットを正常な状態に復旧させられない場合に使用できます。バックドライブモードを実行すると、ロボットの各ジョイントのブレーキをユーザーが解除したり締結することができます。
バックドライブモードを設定する方法は以下のとおりです。
メインメニューで状態ボタンをタップした後、バックドライブボタンをタップしてください。
バックドライブボタンが有効化されていないときは、非常停止ボタンを押してから解除するか、Servo Offボタンを押すと有効化できます。

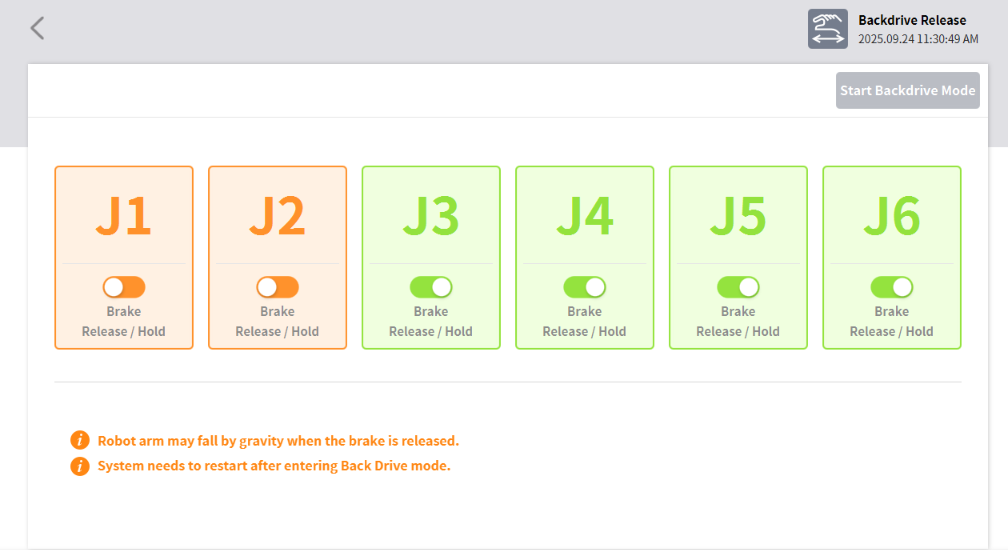
バックドライブ画面でバックドライブモードスタートボタンをタップしてください。
各関節のブレーキを解除するための[Release]ボタンと[Hold]ボタンが有効になっています。
Release: オレンジ
Hold: グリーン
移動させたいジョイントのブレーキをOFF(Release)で設定した後、ロボットに外力を加えて目的の位置に移動させてください。
ジョイント内部の減速機の減速比のためにブレーキを解除しても、ロボットのマニピュレータ(manipulator)自体の重量によるジョイントのたわみ速度は大きくはなく、外力をくわえても低速で動きます。
もし減速機の故障や過度な外力印加などの理由で無動力動作中にジョイントが一定速度以上で動く場合、安全のためにすべてのジョイントのブレーキが自動で締結されます。
位置移動が終わったら、ブレーキをON(Hold)に設定してください。
メインメニューで電源をタップし、運用プログラムを終了した後、ティーチペンダント上段の電源ボタンを長押ししてシステムを終了し、もう一度押してまたシステム電源を入れてください。
バックドライブ状態が解除されて、正常作業がまた行えるようになります。
メモ
ジョイントの位置を正常作業範囲に移動させる作業は、ジョイント別に順次行ってください。
バックドライブモードを実行した場合には、必ず電源を再ブートしてください。そうすればまた作業を行うことができます。
バックドライブモードの際、軸の位置によって瞬間的なたわみが生じる恐れがあるため、注意してください。