
フランジI/O
ロボットのエンドフランジカバーにはM8規格の8ピンコネクタが1つ付いており、位置と形状については下図を参照してください。
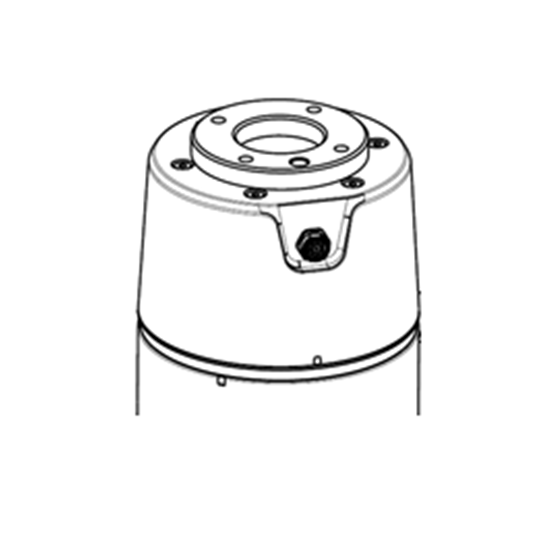
コネクタは、グリッパーや特定ロボットのツールに内蔵されているセンサーを駆動させるための電源と、コントロール信号を提供します。以下の例に示した産業用ケーブルと同じ仕様が適用できます。
Phoenix contact 1404178(Straight)
Phoenix contact 1404182(Right Angle)
Schematic Diagram
各コネクタのピンマップは、次のとおりです。
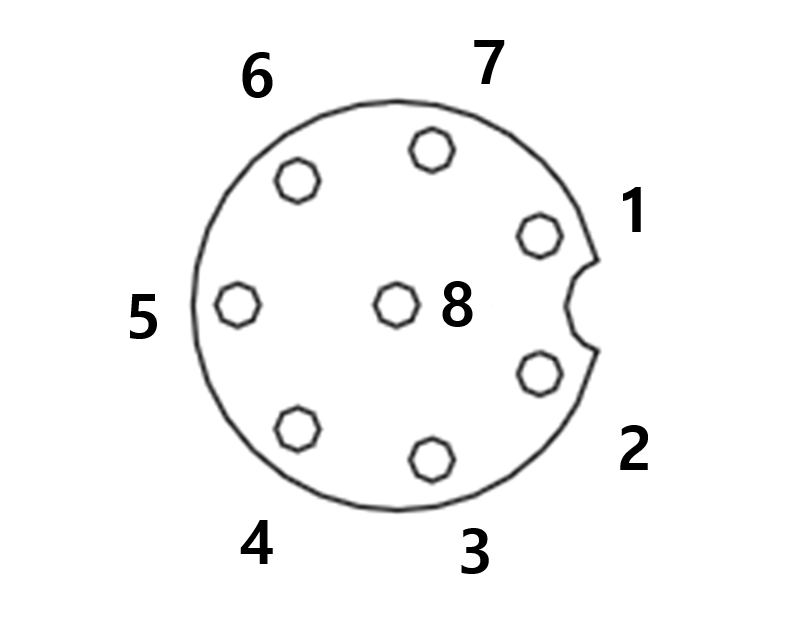
X1 コネクタによって提供される詳細な I/O 構成については、以下の表を参照してください。
2024年11月4日以降、以下のように変更されました。
X1 設定
No | Signal type | Description |
|---|---|---|
1 | Digital Input 1 | PNP (ソース タイプ、デフォルト) |
2 | Digital Output 1 | PNP (ソース タイプ、デフォルト) または NPN (シンク タイプ) に設定します。 |
3 | Digital Output 2 | PNP (ソース タイプ、デフォルト) または NPN (シンク タイプ) に設定します。 |
4 | Analog Input 1 / RS-485 + | 電圧 (0 ~ 10V) または電流 (4 ~ 20mA、デフォルト) に設定します。 / 最大1Mボーレート |
5 | Power | 内部電源を +24V (デフォルト)、+12V または 0V に設定します。 |
6 | Analog Input 2 / RS-485 - | 電圧 (0 ~ 10V) または電流 (4 ~ 20mA、デフォルト) に設定します。 / 最大1Mボーレート |
7 | Digital Input 2 | PNP (ソース タイプ、デフォルト) |
8 | GND |
フランジ入力/出力 (I/O) の初期電源は 0V に設定されており、12V または 24V に設定できます。
I/O 接続時の詳細な電力仕様については、以下の表を参照してください。
Parameter | Min | Type | Max | Unit |
|---|---|---|---|---|
Supply voltage (12V mode) | 11.4 | 12 | 12.6 | V |
Supply voltage (24V mode) | 22.8 | 24 | 25.2 | V |
Supply current | - | - | 3 | A |
ㅤ
2024 年 11 月 4 日より前の I/O 構成は次のとおりです。
X1構成(デジタルIN/OUTPUT、RS 485)
No | Signal | Description |
1 | Digital Input 1 | PNP (ソース タイプ、デフォルト) |
2 | Digital Output 1 | PNP (ソース タイプ、デフォルト) または NPN (シンク タイプ) に設定します。 |
3 | Digital Output 2 | PNP (ソース タイプ、デフォルト) または NPN (シンク タイプ) に設定します。 |
4 | RS485 A | 最大1Mボーレート |
5 | Power | +24V |
6 | RS485 B | 最大1Mボーレート |
7 | Digital Input 2 | PNP (ソース タイプ、デフォルト) |
8 | GND |
警告
生産日付(ロボットラベルmfg date)によるI/Oの構成を確認してからToolとグリッパーを構成してください。
斗山ロボットラボで確認できます。(https://robotlab.doosanrobotics.com)
上記で示しているI/Oの構成を無視してロボットツールを駆動すると、製品の永久的な損傷を招くことがあります。
フランジ I/O の内部電源は 24V に設定されており、I/O 接続時の詳細な電源仕様については下の表を参照してください。
Parameter | Min | Type | Max | Unit |
Supply voltage | - | 24 | - | V |
Supply current | - | 2 | 3 | A |
Digital output | - | 2 | - | EA |
Digital input | - | 2 | - | EA |
警告
電源遮断時、いかなる危険な状況も発生しないように、Toolとグリッパーを構成してください。
(例えば、ツールからwork-pieceが落下する状況)
ロボットの電源印加時、各コネクタの5番端子は常に24Vが出力されているため、ツールとグリッパーを構成する際はロボットの電源を遮断してから作業してください。