リモートコントロールを設定する
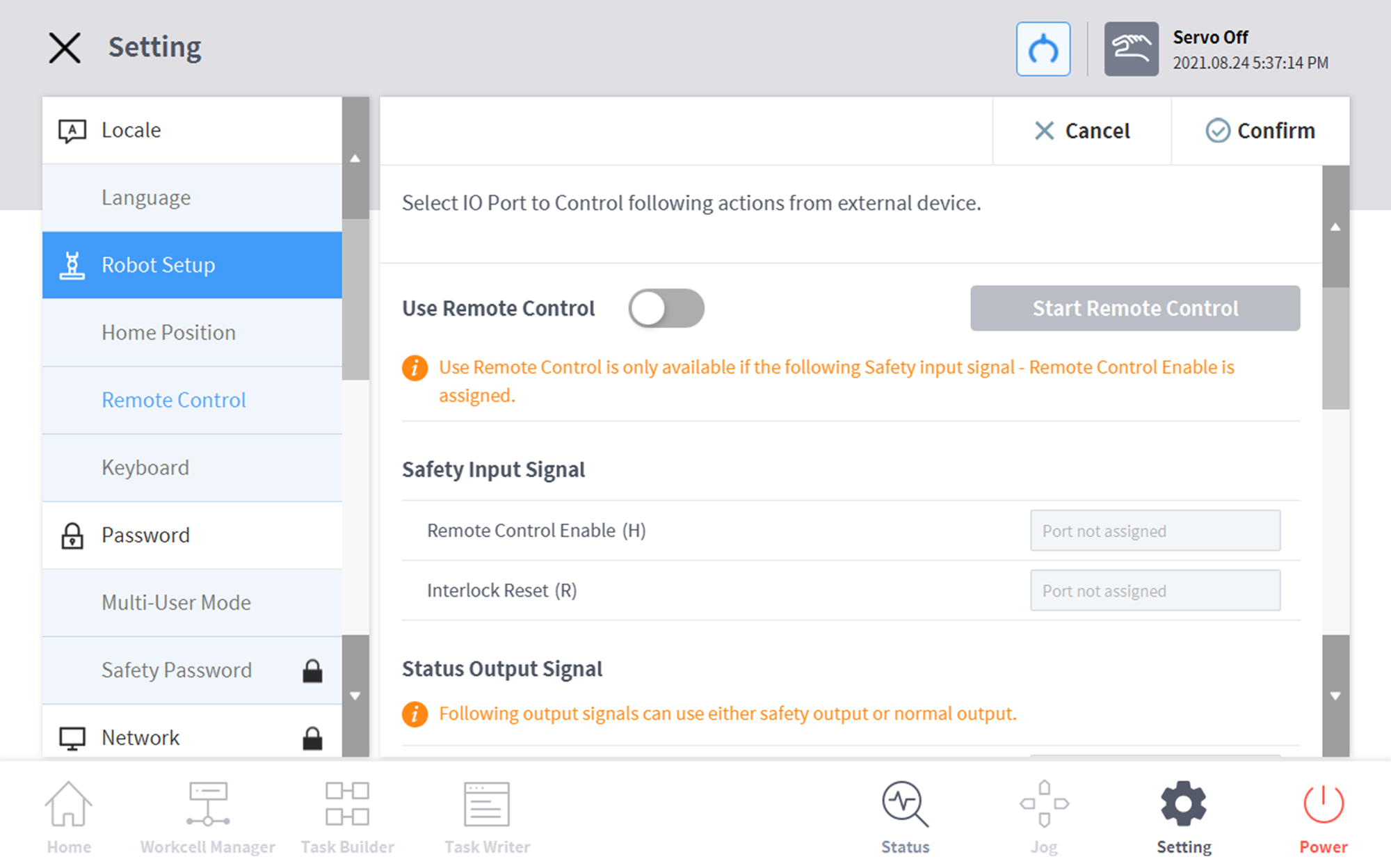
- 設定 > ロボット設定メニューでリモートコントロールメニューを選択します。
- 現在の設定情報は設定管理ウィンドウに表示されます。
- 安全入力信号を設定します。
- ワークセルマネージャー > 安全 I/O > 入力タブで、編集 > ポートを選択し、リモートコントロール有効(H)を設定します。
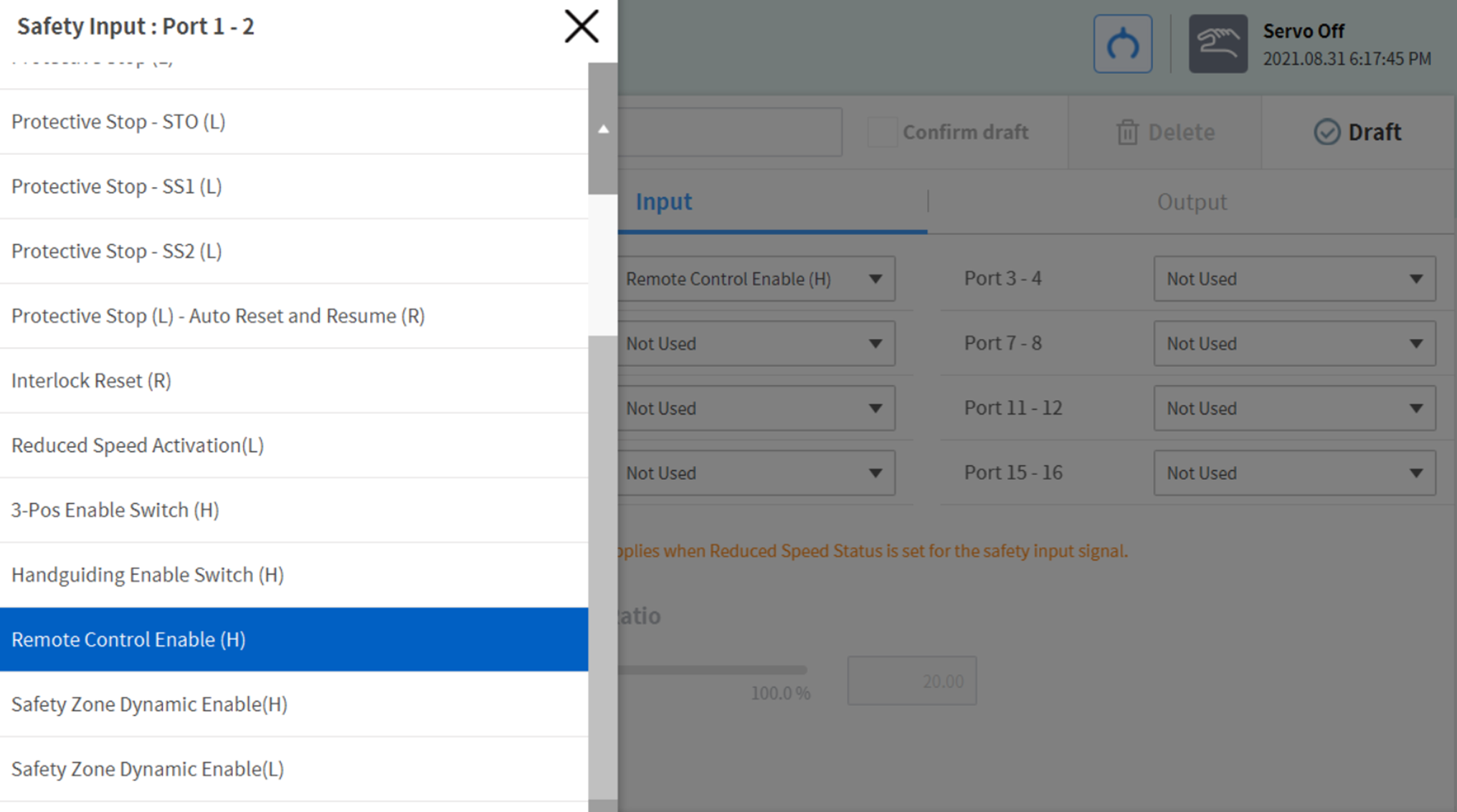
- ワークセルマネージャー > 安全 I/O > 入力タブで、編集 > ポートを選択し、リモートコントロール有効(H)を設定します。
- リモートコントロール使用ボタンをオンに設定します。
- リモートコントロールをオンの状態でシステムを再起動すると、リモートコントロールモードで起動します。

- リモートコントロールをオンの状態でシステムを再起動すると、リモートコントロールモードで起動します。
- ステータス出力信号選択値を入力します
- 出力信号は、ワークセルマネージャー > 安全 I/O 出力タブと通常 I/O 出力タブで設定できます。
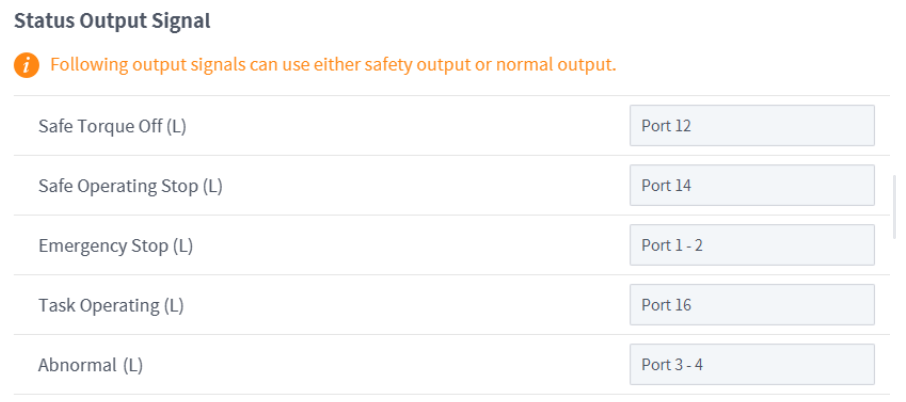
- 安全 I/O 設定項目
- 緊急停止(L)
- 異常(L)
- 通常 I/O 設定項目
- 安全トルクオフ(L)
- 安全動作停止(L)
- タスク動作(L)
- 出力信号は、ワークセルマネージャー > 安全 I/O 出力タブと通常 I/O 出力タブで設定できます。
- 制御入力信号選択値を入力します
- リモートコントロール使用ボタンオン、安全入力信号が設定されていない場合は設定できません。
- デフォルトのロードタスク選択値を入力します
- リモコン使用ボタンはオンです。安全入力信号が設定されていない場合は設定できません。
- 完了したら確認ボタンをタップします。
- これでリモコンの環境設定が完了しました。

- これでリモコンの環境設定が完了しました。
- 外部デバイスを使用したリモコン操作を許可するには、リモコン開始ボタンをタップしてリモコンモードを有効にします。
- 外部デバイスから実行するタスクの情報が表示されます。
- 外部デバイスからのモーション入力は、「リモコンを有効にする」ボタンに緑色の信号が表示されている場合にのみ実行できます。
- リモコンを有効にするボタンに赤色の信号が表示されている場合は、外部デバイスから有効信号を入力します。
メモ
- リモートコントロールモードで非常停止(Emergency Stop)または保護停止(Protective Stop)が発生すると、次のように処理されます。
- 非常停止:非常停止のポップアップが表示されます。非常停止の原因を取り除いた後、非常停止スイッチを引くか回してリセットすると、ポップアップが自動的に閉じます。
- Servo Off状態に切り替える保護停止:赤色の保護停止のポップアップ画面が表示されます。保護停止の原因を取り除いた後Servo On信号が入力されると、ロボットのサーボドライブが起動し、ポップアップウィンドウが自動的に閉じます。
- Interrupted状態に切り替える保護停止:黄色の保護停止のポップアップ画面が表示されます。保護停止の原因を取り除いた後Interlock Reset信号が入力されると、ロボットの状態が手動待機(Manual Standby)、自動待機(Auto Standby)、HGC待機(HGC standby)のうちの一つの正常待機状態に切り替わります。ロボットを動かさないと原因を取り除けない安全違反の場合、コクピットを活用した狭窄脱出機能(Clamping Escape by Cockpit)を使用することができます。
- 詳細については、「 モード別の状態とロボットLEDのカラー」で確認することができます。
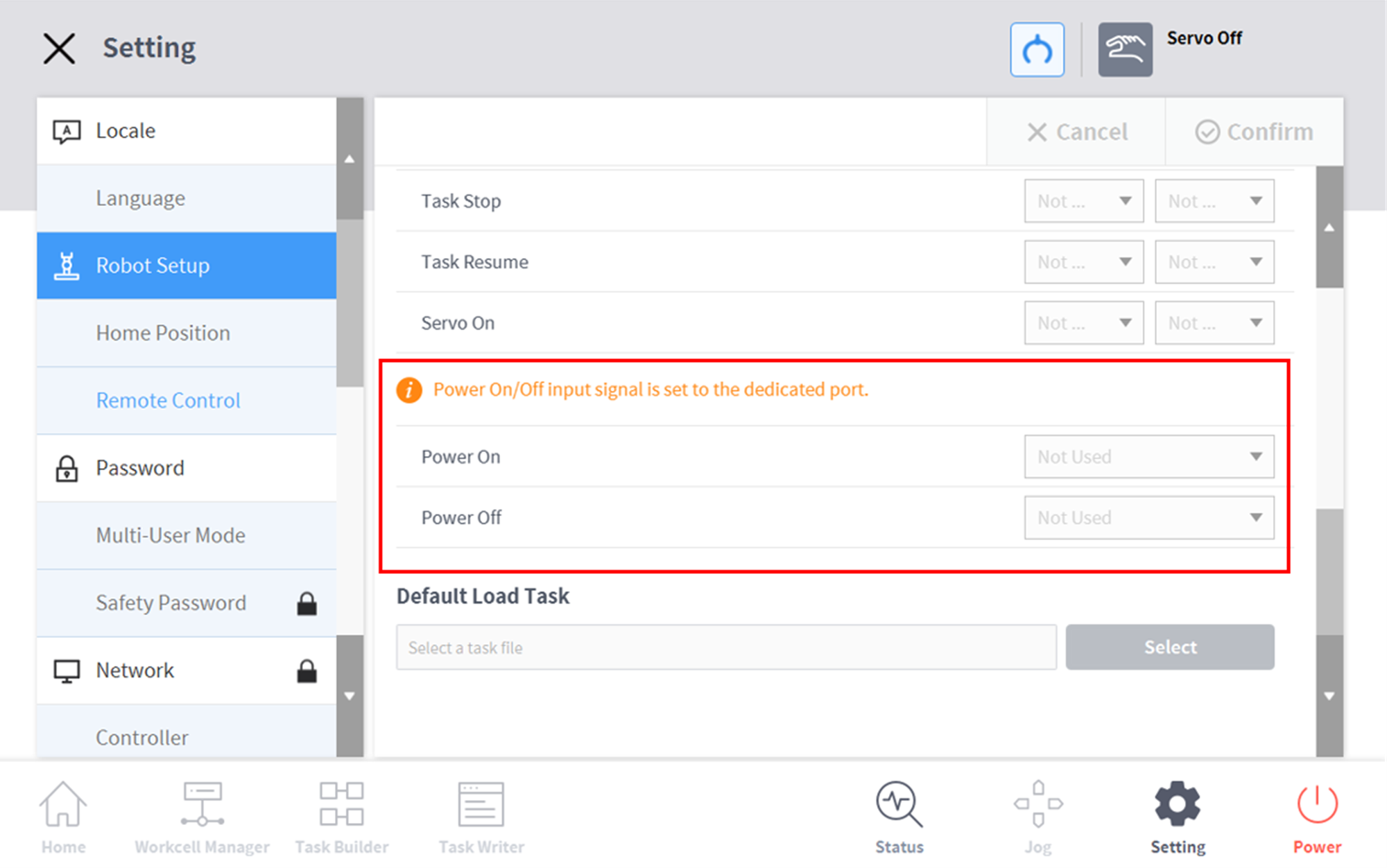
- リモートコントロールの電源を入れたり切ったりできます。
- メインメニューの設定ボタンをタップしてから、ロボット設定にあるリモートコントロールを選択してください。
- 以下のように電源オンまたは電源オフの使用の有無を選択して、リモートコントロール専用ポートの電源を入れたり切ったりできます。