ステップランを活用する
ティーチペンダントには、タスクビルダ/ライタ内の指定されたコマンドステップからタスクプログラムを実行できるステップ実行機能が備わっています。
デバッグ機能と併用することで、効率的なプログラム作成が可能になります。
ここではタスクビルダーをベースにステップラン機能とその使い方を説明しますが、タスクライターでも同様の手順で使用できます。
注記
ステップラン機能を使用してタスクを実行するには、ロボットがサーボオン状態である必要があります。 [ステータス] > [サーボオン] ボタンを押して、ロボットをサーボオンに設定します。
ステップ実行機能は、次のコマンドでは使用できません。
グローバル変数
Mainsub 上のカスタム コード
壊す
出口
続く
ムーブSX、ムーブSJ、ムーブBのセグメント
ビジョン/コンベア/ウォッチスマートペンダント内の子コマンド
スレッドとスレッド内の子コマンド
スクリプトファイルを使用したカスタムコード
使用シナリオは次のとおりです。
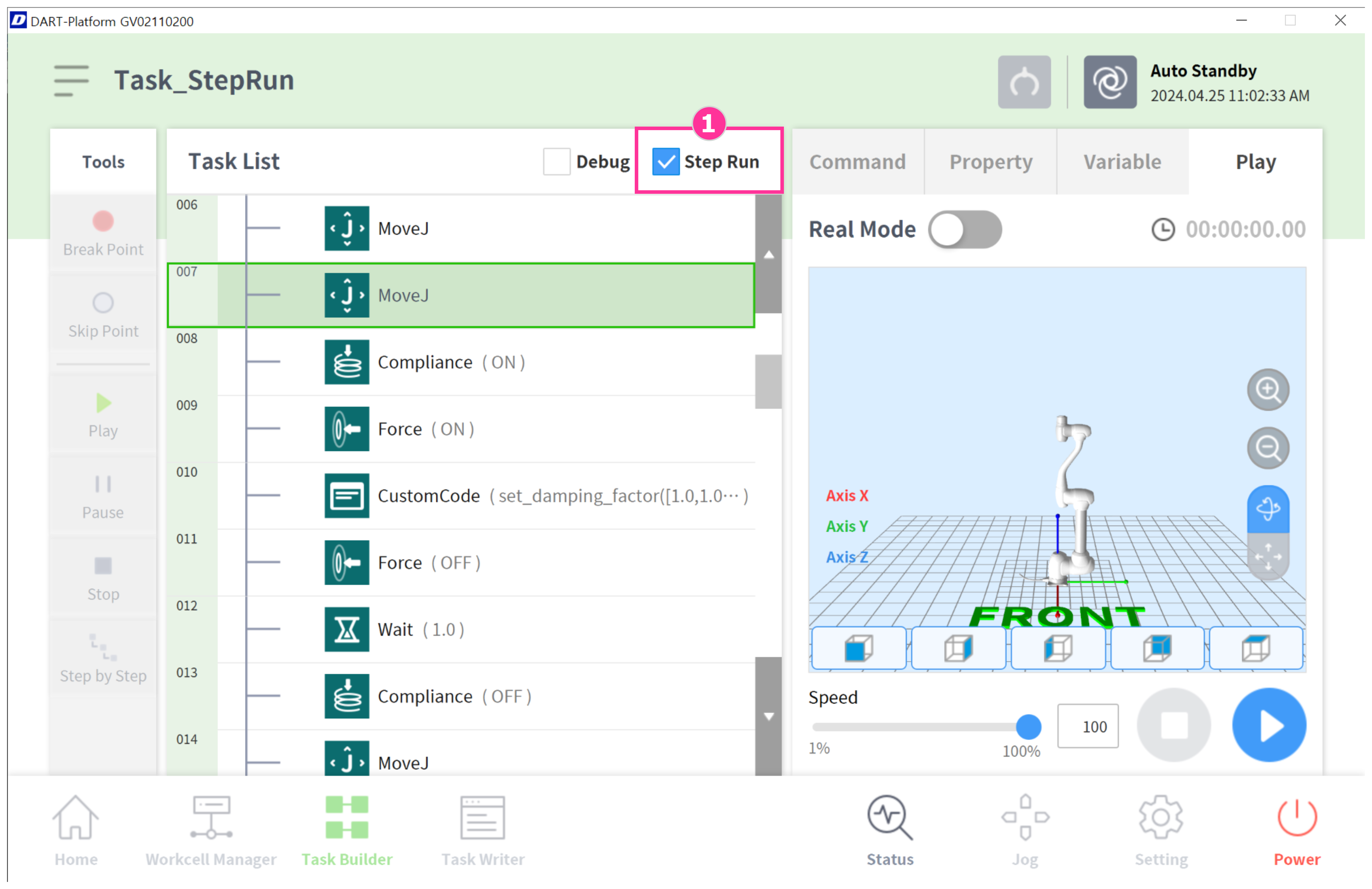
Task Builder/Writer 内の Play タブに入ります。
「ステップ実行」チェックボックスを選択します。 (1)
プログラムの実行モードを選択します。 (リアルモード/バーチャルモード)
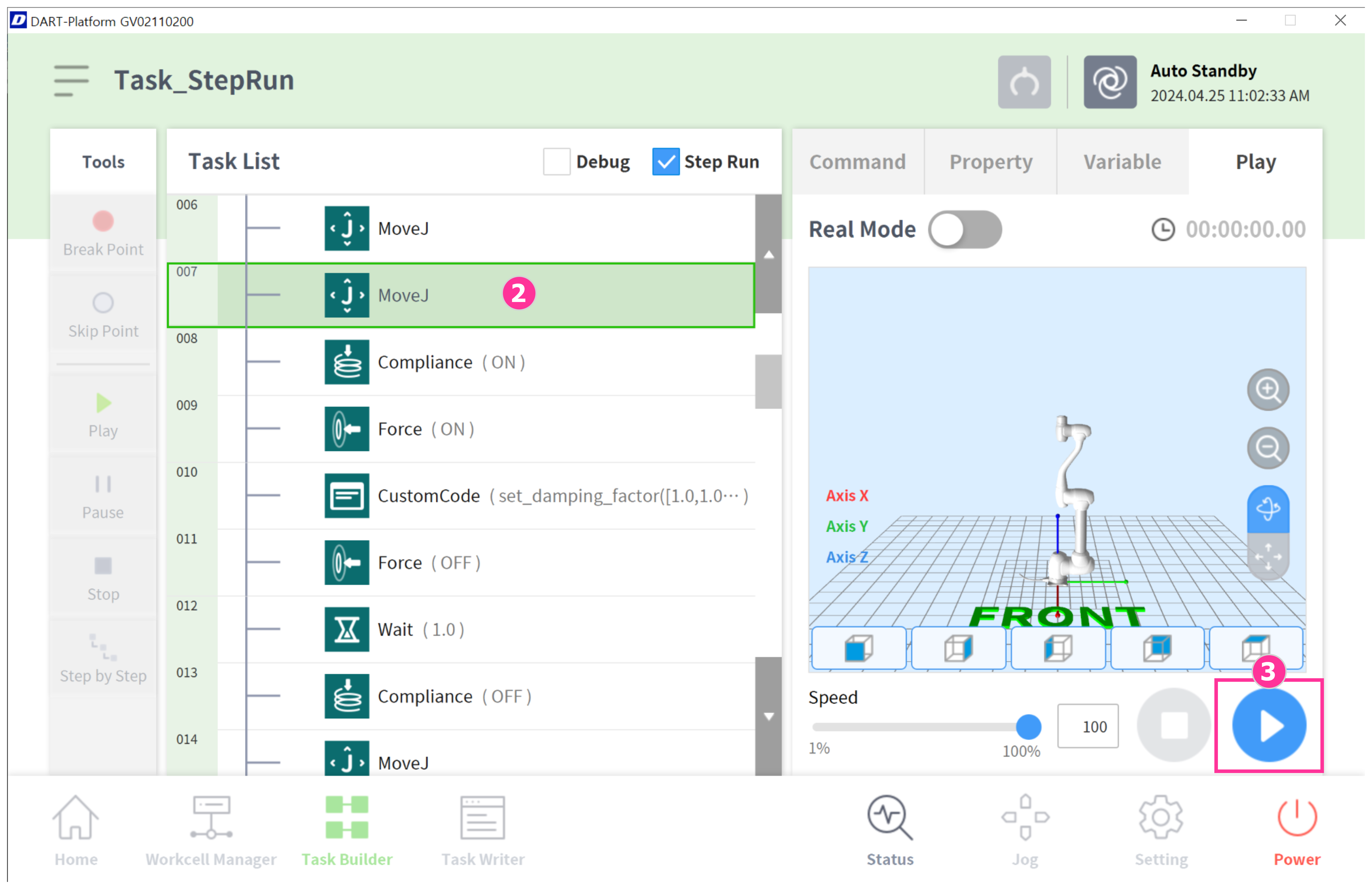
タスクリスト (2) で開始するコマンドを選択し、再生ボタンを押します (3)。
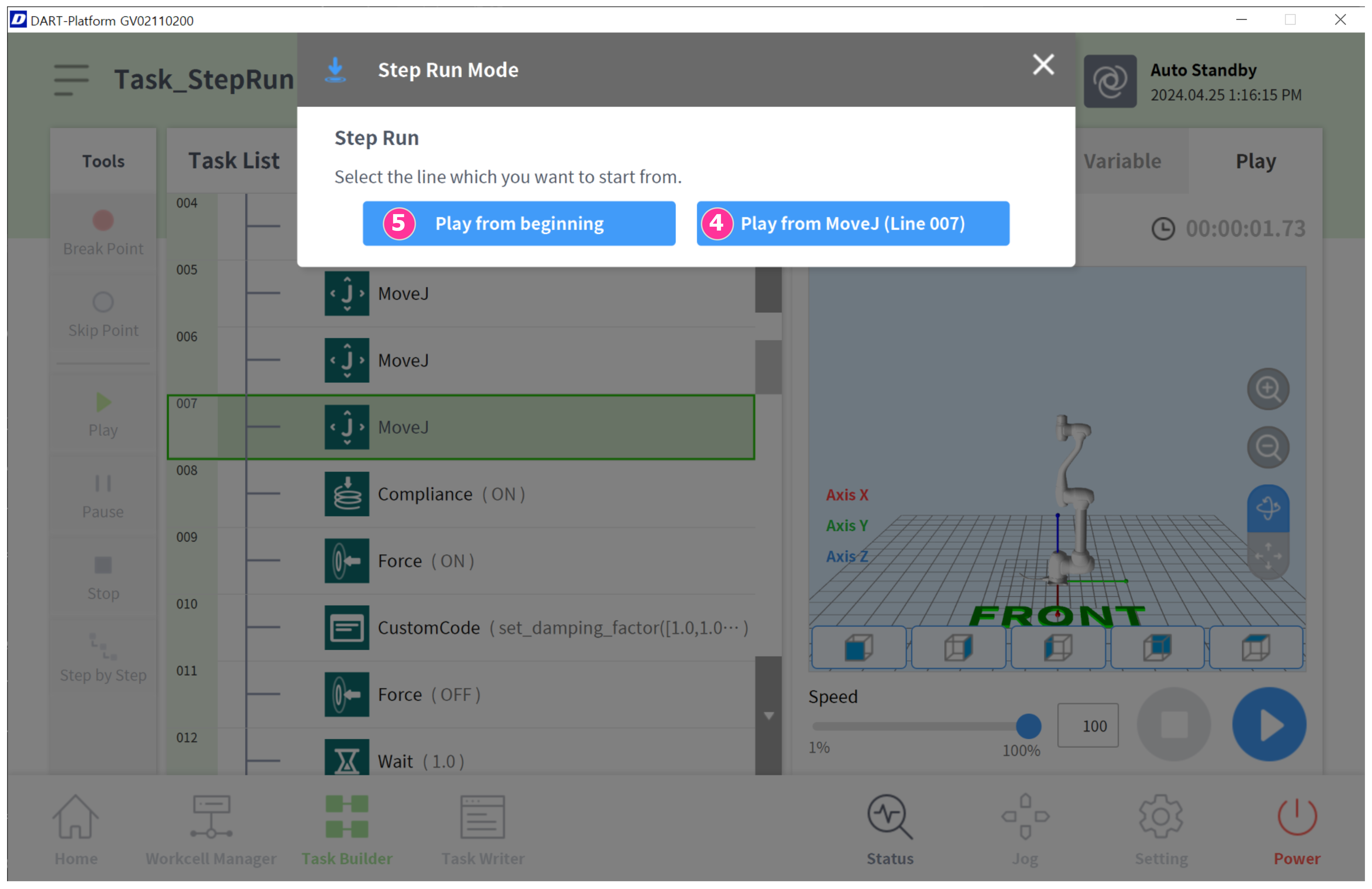
Step Run Mode ポップアップで、(4) ボタンを選択すると、指定したコマンドから開始します。(5) ボタンを押すと、プログラムを最初から実行することもできます。
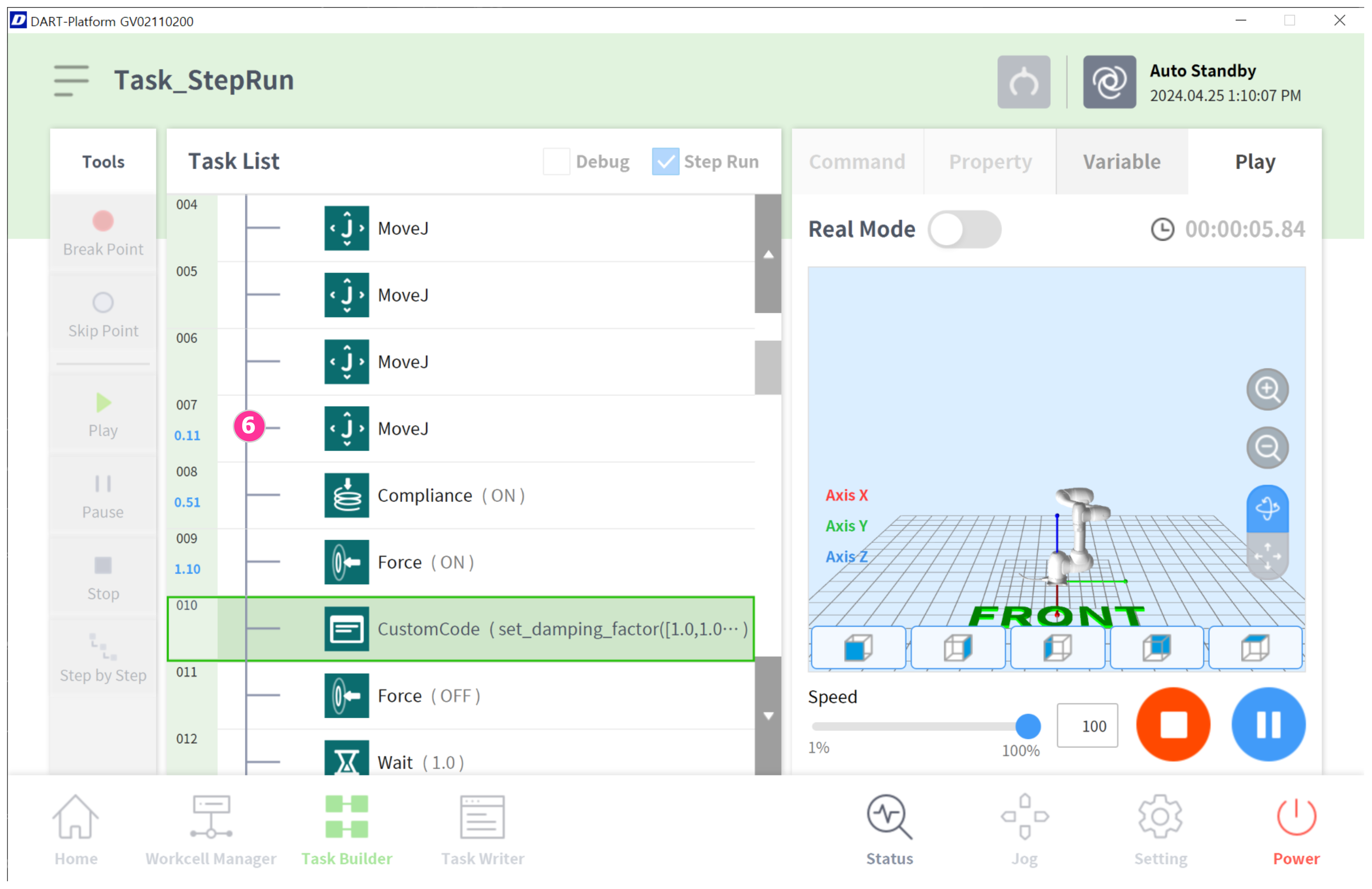
指定行から開始を選択後、プログラムの実行を確認します。(6)