
ロボットのツールを基準として実行する
ロボットのツールを基準にロボットを移動する方法は次のとおりです。
Jog画面でTaskタブを選択してください。
表示座標系にベース又はワールドを選択した後、タスク座標系を基準点としてツールを設定してください。
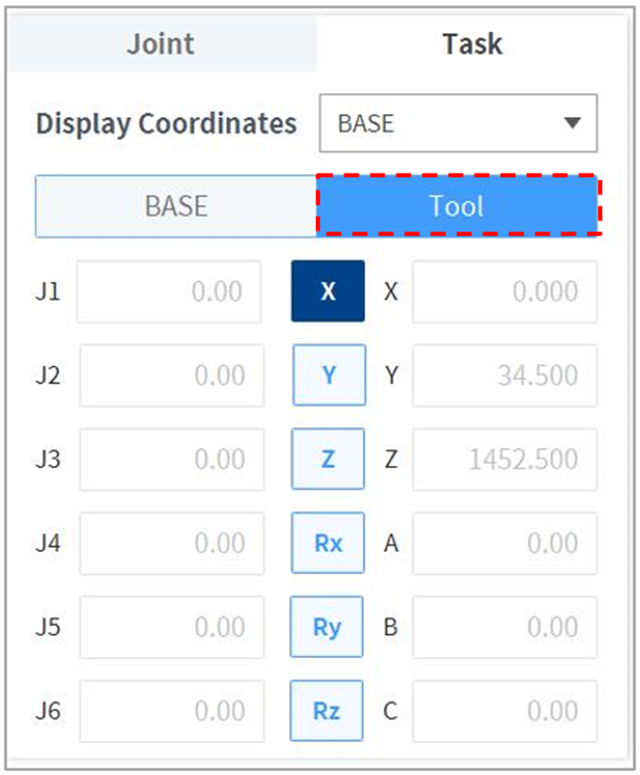
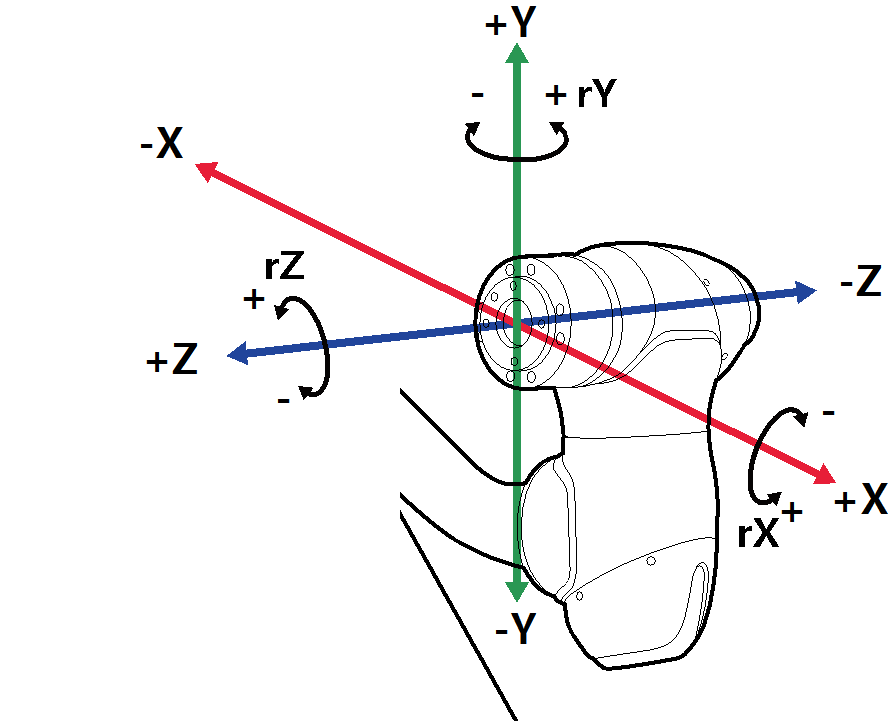
移動するツール座標系を選択してください。
方向ボタン(


メモ
安全地域はバーチャルモードでは適用されません。
Rx、Ry、RzはTCP(Tool Center Position)を基準として実行されます。