
オペレータ介入機能
ロボットの動作中に問題が発生した場合、またはユーザーがコマンドを発行した場合、ロボットは動作を停止し、ポップアップ メッセージが表示され、オペレータが介入して状況を解決することができます。ユーザーが問題を解決した後、タスクは問題が発生したプログラム ラインで続行されます。
注
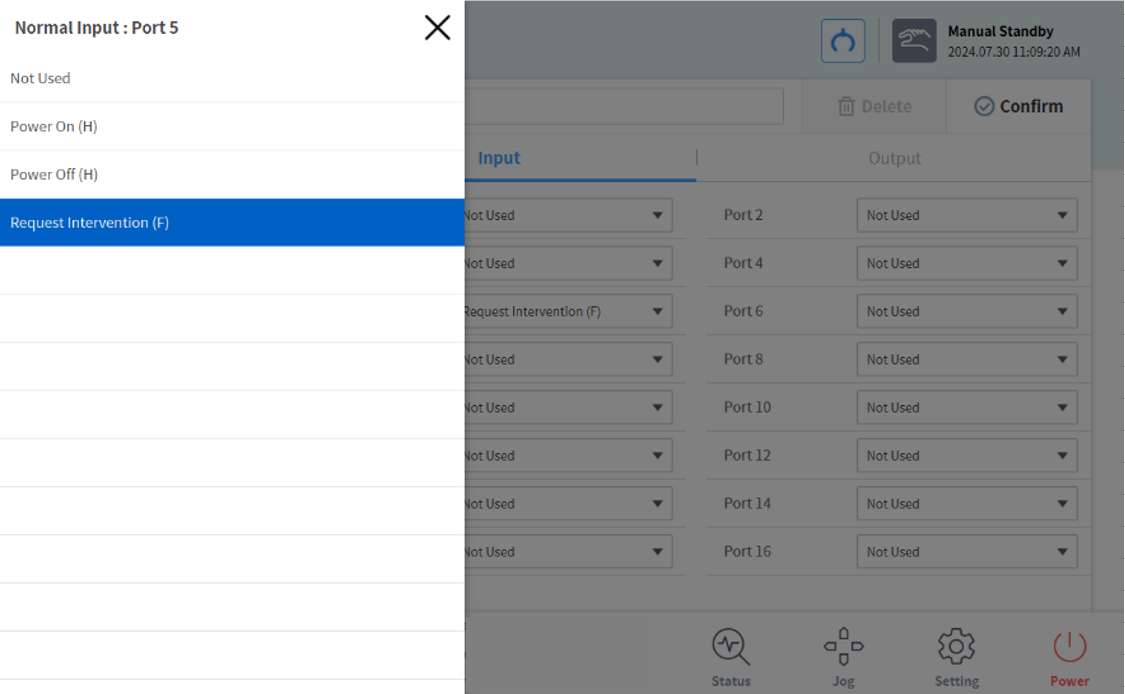
作業者介入機能を使用するには、以下の設定のいずれかを完了する必要があります。
Workcell Manager - Normal I/O - Input - Request Intervention (F)
Workcell Manager - Peripheral - Ananlog Welding Machine - Welding Input Signal
(詳細な設定については、Welding Techinical Noteを参照してください。)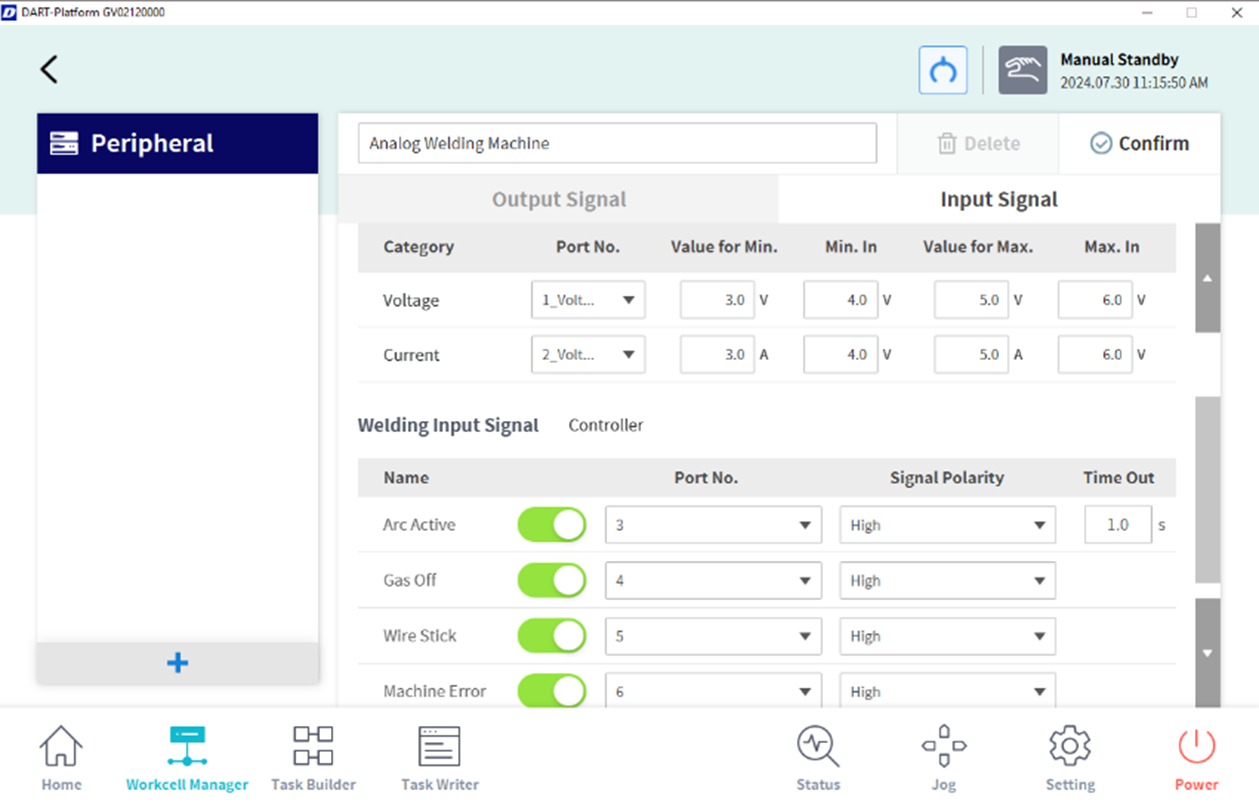
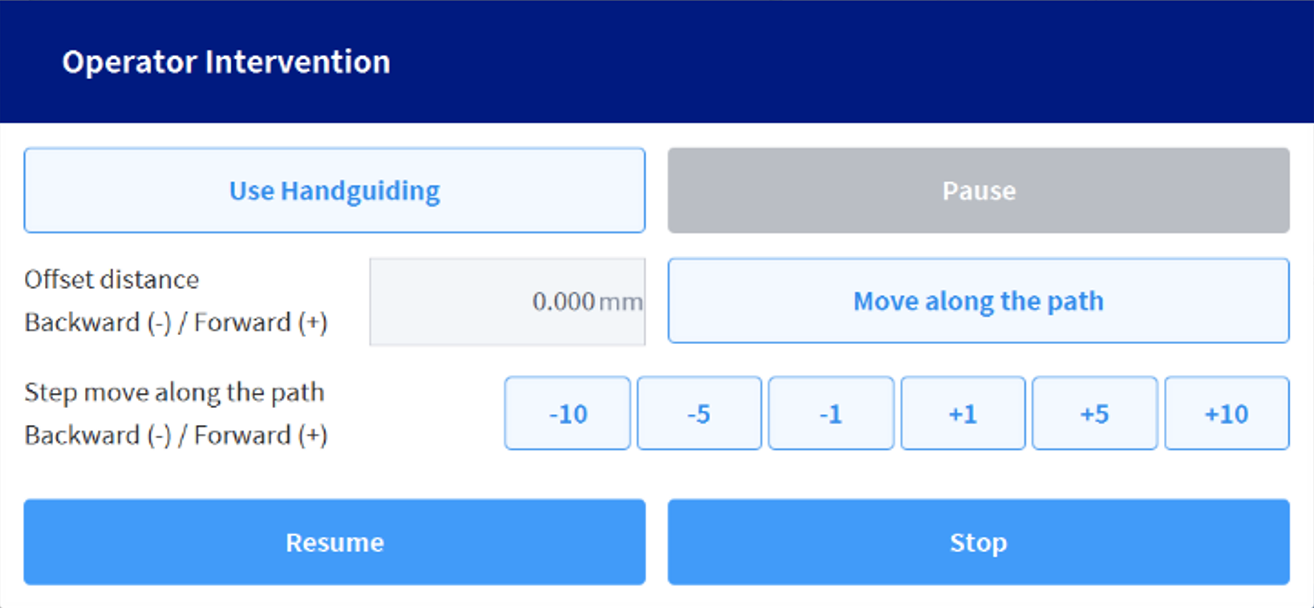
「パスに沿って移動ボタン」と「ステップ移動ボタン (-10、-5、-1、+1、+5、+10)」は同じアクションを実行します。ただし、前者は手動で入力したオフセットだけ基準位置から前方または後方に移動しますが、後者は事前に設定されたステップ オフセットだけ前方または後方にポイントをターゲットします。上記のボタンを使用してアクションを完了した後、追加のボタンを押すと、現在の位置がオフセットだけ移動します。
「ハンドガイドボタン使用」は、コラボレーションゾーンが設定され、ロボットの状態がハンドガイド状態に変わり、ゾーン内で直接ティーチングが可能になった場合にのみ有効になります。その後、コックピット背面またはティーチングペンダントのボタンを押すことで、直接ティーチングを有効にできます。
ハンドガイドモードでは、「ハンドガイドボタン使用」は「ハンドガイド終了ボタン」に変わります。
「ハンドガイド終了ボタン」を押すと、ハンドガイド状態が終了します。このとき、安全上の理由から、現在のロボットの位置、角度、停止点(最初のポップアップが発生した時間)の値を比較してポップアップを生成します。次の内容のポップアップが発生した場合は、再度直接ティーチングしてロボットの位置と姿勢を修正し、再試行する必要があります。
現在の TCP 位置と停止位置の TCP 間の直線距離が 20 cm 以上異なる場合
現在のジョイント角度と停止点のジョイント角度の差が 1~3 軸 (10 度) / 4~5 軸 (30 度) / 6 軸 (60 度) 以上異なる場合
この機能は、MoveL / MoveC / MoveB 操作中にのみサポートされます。
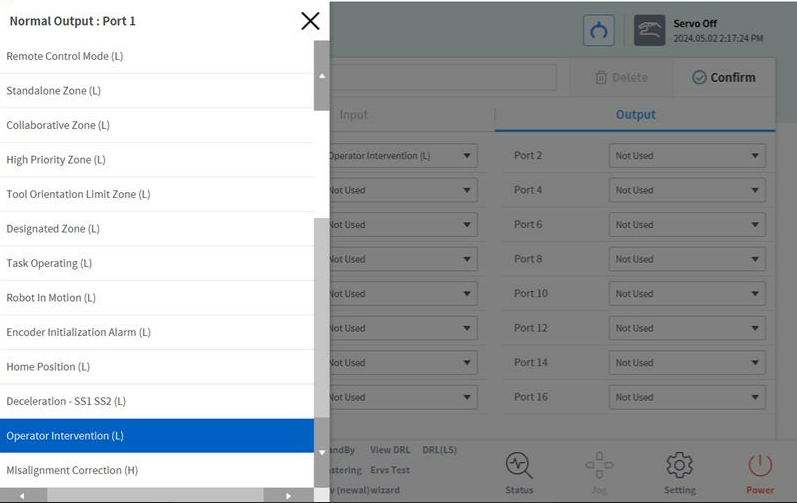
ポップアップが発生したことを通知するには、通常出力機能を使用できます。ポップアップが発生している間は信号がアクティブのままになり、ポップアップが終了すると非アクティブになります。
Workcell Manager - Normal I/O - Output - Operator Intervention (L)
使用シナリオは次のとおりです。
プログラムの実行中に、ユーザーまたは接続されたデバイスからデジタル入力信号を受信します。
ロボットが一時停止し、オペレーター介入ポップアップが表示されます。
(ダイレクトティーチングを使用する場合) [ハンドガイドの使用] ボタンを押してから、コックピットまたはティーチングペンダントの背面にあるボタンを押して、ダイレクトティーチングをアクティブにします。直接ティーチング操作が完了したら、[ハンドガイド終了] ボタンを押します。
[パスに沿って移動] ボタンを押して、ロボットをパスに沿って移動します。
ロボットを必要なだけ移動したら、[再開] ボタンを押してロボットのタスクを再開し、ポップアップを閉じます。