スペース制限(Space Limit)/区域(Zone)の形に対する設定方法は次のとおりです。
項目 | 説明 |
|---|
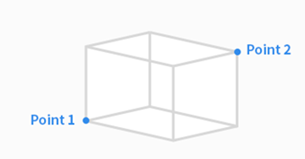
Cuboid | スペース制限(Space Limit)/区域(Zone)の形を直方体で構成します - 直方体の下限点(ポイント1)と上限点(ポイント2)を入力した後、ポーズ保存ボタンをタップしてください。
|
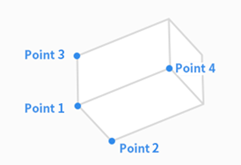
Tilted Cuboid | スペース制限(Space Limit)/区域(Zone)の形を傾いた直方体で構成します。 4点による設定 - 傾いた直方体の基準点(ポイント1)、x軸の終点(ポイント2)、y軸の終点(ポイント3)、z軸の終点(ポイント4)を入力した後、ポーズ保存ボタンをタップしてください。
- ポイント1-ポイント2、ポイント1-ポイント3、ポイント1-ポイント4の3つの線は、それぞれ直角にならなければなりません。(+/- 5度の誤差を許容)
- ポイント1を基準としてコクピットの“面固定”及び“軸固定”拘束モーション機能を使えば、ポイント2、ポイント3、ポイント4の点をより簡単に得ることができます。
3点と高さによる設定 基準点 (点 1)、x 軸上の点 (点 2)、xy 平面上の点 (点 3) を入力します。
xy 平面上の点 (点 3) の位置によって、基準点 (点 1) と x 軸上の点 (点 2) によって形成される線に垂直な y 軸の方向が決まります。 そしてxy平面上に位置します。
基準点、x軸方向、y軸方向が決まれば、右手の法則によりz軸方向が決まります。 基準点と3軸の方向が決まると、縦、横、高さを設定することで傾斜直方体のサイズを指定できます。 傾いた直方体は、x、y、z オフセットを設定することで平行移動(平行移動)できます。
実際の点 1 の横にある「移動」を押して傾斜した直方体の終点 (頂点) に到達した後、実際の点 2、実際の点 3、または実際の点 4 の横にある「移動」を押すと、ロボット TCP はそれを軸に沿って移動します。 傾いた直方体の端を届く範囲まで。 このようにして、傾斜直方体の位置と方向の設定を確認できます。 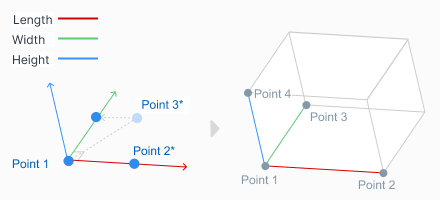
|
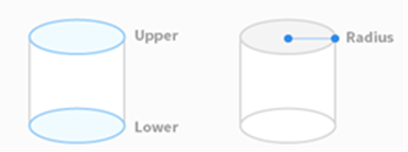
Cylinder | スペース制限(Space Limit)/区域(Zone)の形を円柱で構成します。 - 円柱の半径距離点、上面の一点、底面の一点を入力した後、ポーズ保存ボタンをタップしてください。
|
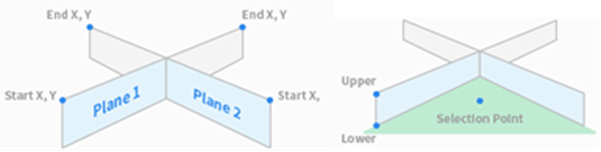
Multi-plane Box | スペース制限(Space Limit)/区域(Zone)の形を多面ボックスで構成します。 - 多面ボックスの上段、下段の高さを指定し、ポーズ追加ボタンを押して面を追加します。
- X、Y座標を二つ指定して面の方向を設定した後、ポーズ保存ボタンをタップしてください。最大6つの面を設定できます。
- 設定したい領域の点の座標を設定します。
|
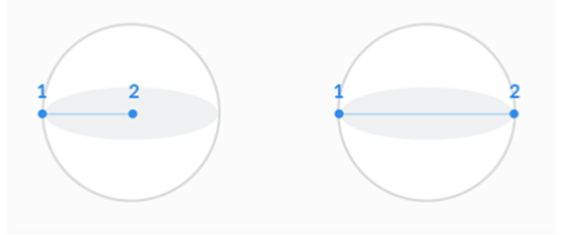
Sphere | スペース制限(Space Limit)/区域(Zone)の形を球で構成します。 - 半径で設定する場合は球の中心点と終点の位置を入力し、直径で設定する場合は球の両終点位置を入力した後、ポーズ保存ボタンをタップしてください。
|
