
スペース制限を設定する
ロボットのスペース制限を設定するには、ロボットワークセルで 
- ワークセル設定画面上段のワークセル名入力画面に、登録しようとするワークセルの名前を入力してください。
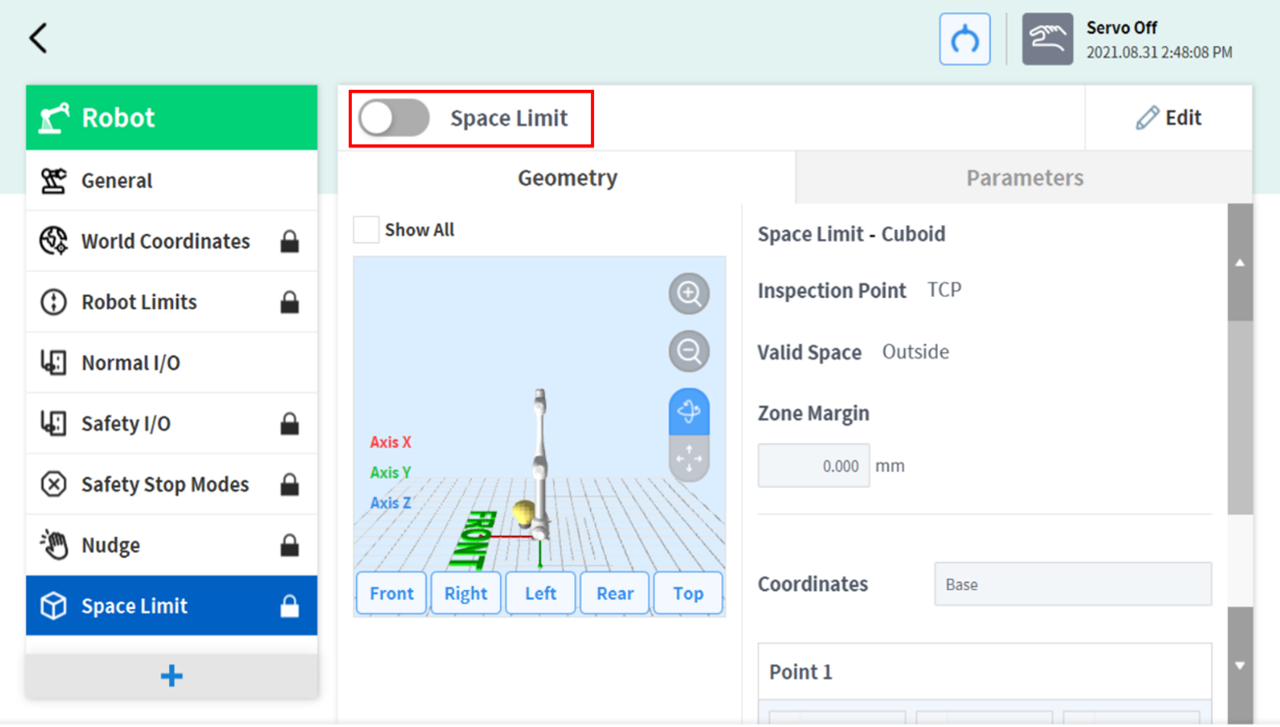
- 形(Geometry)タブで、スペース制限(Space Limit)の形に基づくポーズ情報と検査位置(Inspection Point)、有効スペース(Valid Space)、区域マージン(zone Margin)を設定してください。
- パラメータ(Parameters)タブで、動的区域有効化(Dynamic Zone Enable)と高級オプション(Advanced Option)を設定後、臨時保存(Draft)ボタンを押してください。
- 表示されたすべてのパラメータ値が設定しようとする値と一致することを確認後、臨時保存確定(Confirm draft)を選択し、確認(Confirm)を押してください。
- 有効化トグルボタンを押してスペース制限を適用させてください。
メモ
設定方式によって区域マージンの基本値が存在します。
- ツールの形設定、Body volume check未選択時、TCPマージン値 0mm
- ツールの形設定、Body volume check選択時、TCPマージン値 0mm
- ツールの形未設定、Body volume check未選択時、TCPマージン値 0mm
- ツールの形未設定、Body volume check選択時、TCPマージン値 60mm