
ロボットの固定
マニピュレーターベースにある9.0mmの穴4つに、M8ボルトを利用して固定してください。
- ボルトを固定するときは、20Nmのトルクでボルトを締めることをおすすめします。 振動による緩みを防ぐため、ワッシャー(スプリング-平)を使用してください。
- マニピュレーターを固定位置に正確に設置すべき場合は、2個のΦ5の位置決定ピンを利用すると希望の位置に設置できます。
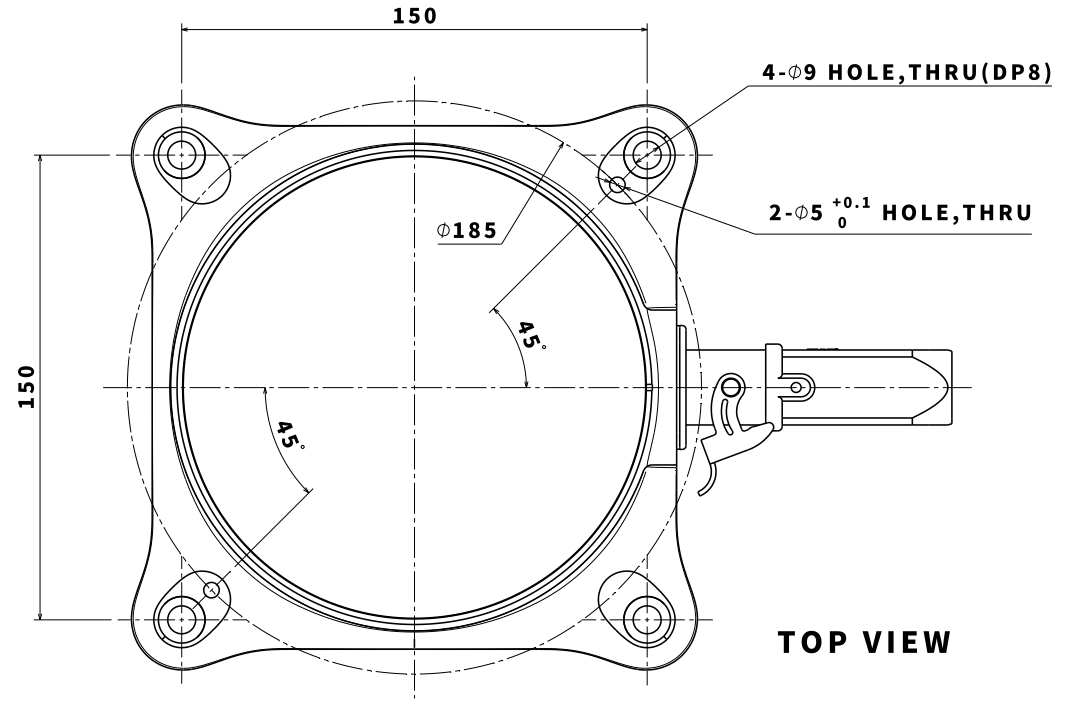
マニピュレーターベース図面(Mシリーズ)。単位[mm]
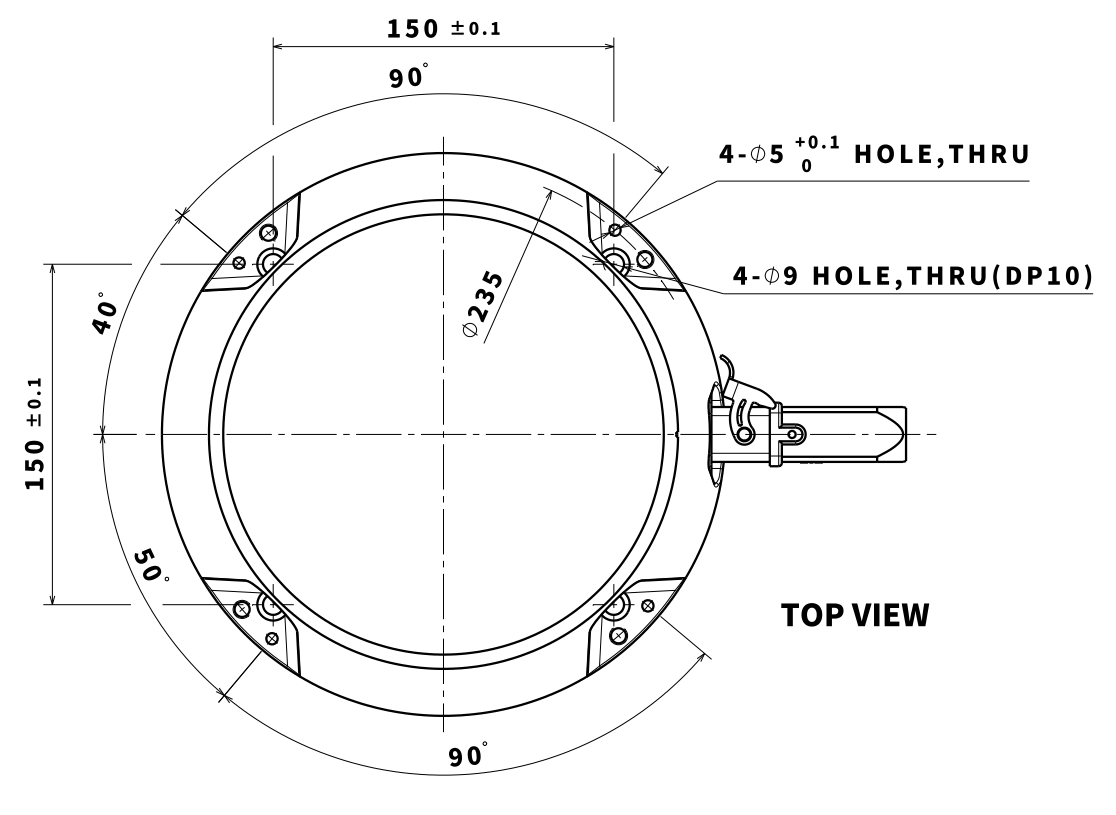
マニピュレーターベース図面(Hシリーズ)。単位[mm]
警告
- ロボットが作動するときにボルトが緩まないよう、マニピュレーターが作動するときにボルトが緩まないよう、最後まで締めてください。
- マニピュレーターのベースは、ロボットの重量とロボットが作動する際に発生する荷重(ロボットの最大トルクの10倍、及びロボットの重量の5倍)に耐えられる堅固な面に設置してください。
- マニピュレーターベースに振動が生じると、ロボットは自動的に衝突と判断して非常停止します。 そのため、自動的に位置が移動する場所に設置する場合、移動加速度が大きい場所には設置しないでください。
- マニピュレーターが長時間水に浸かると損傷することがありますから、濡れる可能性のある環境や水中では使用しないでください。