コンプライアンスコマンドのサンプルを試してください
オプション 標準( NORMAL ) 20 分

このサンプルは Task Writer に作成されます。このサンプルは、タスクビルダでほぼ同じ方法で試すことができます。
注意
- サンプルを試す前に、必ず読み、それに従って 使用時の注意事項ください。詳細については、を参照 パート 1 :安全マニュアルしてください。
注
- コンプライアンス制御を有効または無効にするときに外部トルクが 15Nm 以上の場合、ロボットは JTS (ジョイントトルクセンサ)エラーのためにプログラムを停止します。
- 剛性変更は、外部トルクサイズに関係なく実行できます。
- コンプライアンス制御中は、 MoveJ コマンドなどのジョイント動作を実行できません。
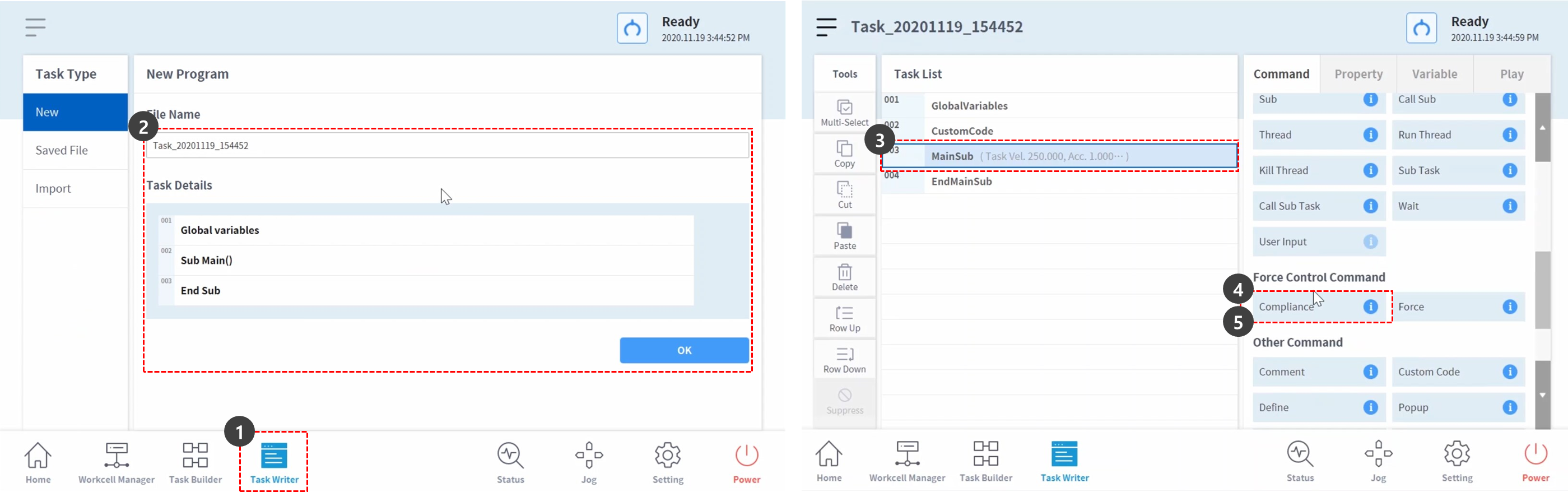
- 下部のメニューから Task Writer を選択します
- タスク名を入力し、 [OK] ボタンを押します。
- タスクリストの 3 行目から MainSub コマンドを選択 します。選択した行の次の行に新しいコマンドが追加されます。
- コンプライアンスの追加コマンド。このコマンドは、コンプライアンス制御を有効にするために使用する予定です。
- 別のコンプライアンス管理を追加します。このコマンドは、コンプライアンス制御を無効にするために使用する予定です。
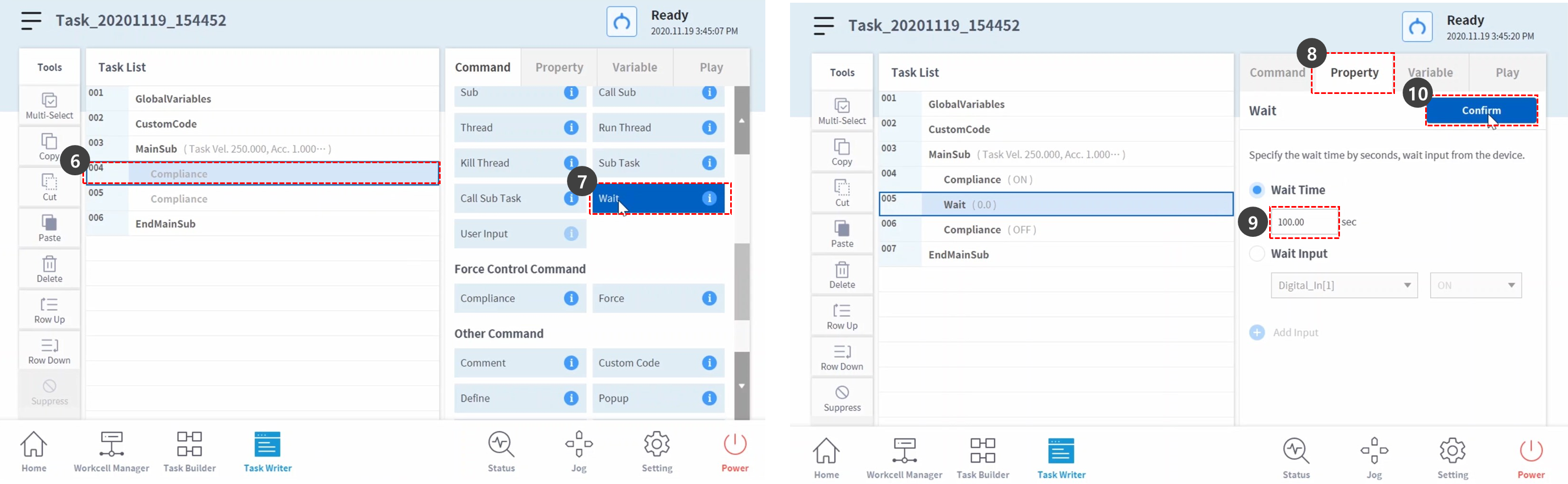
- 4 行目で [ コンプライアンス( Compliance ) ] コマンドを選択します。選択した行の次の行に新しいコマンドが追加されます。
- 待機コマンドを追加します。
- [ プロパティ ] タブを選択します。
- 待機時間を次のように設定します。
- 待機時間:100 秒
- 確認ボタンを押します。
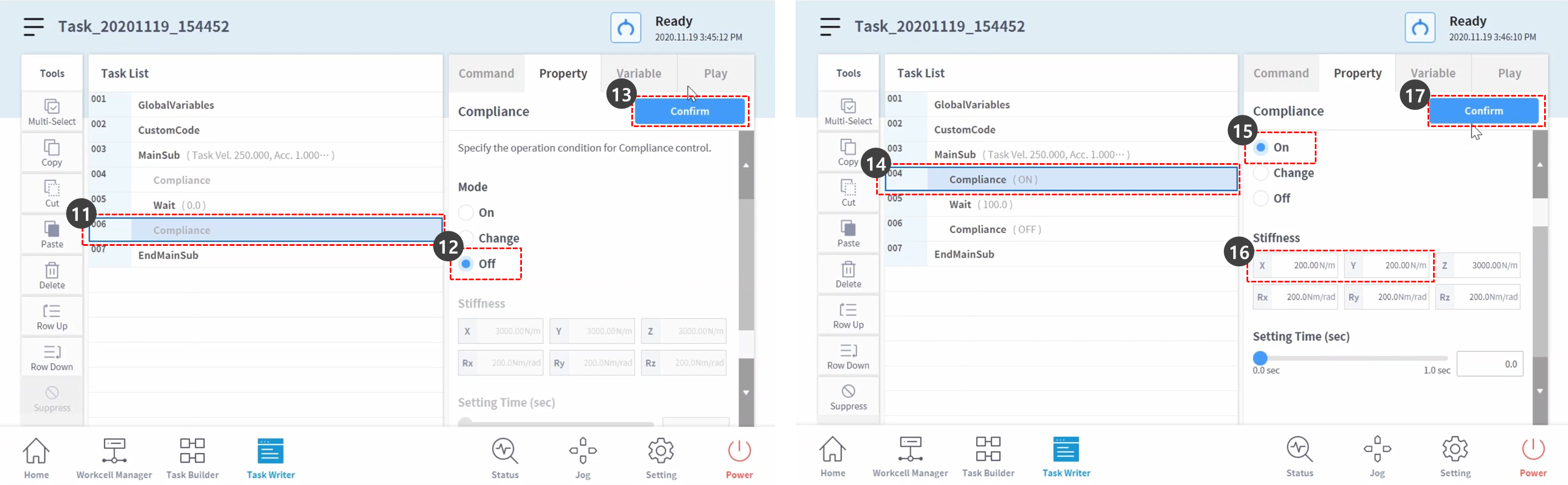
- 6 行目で [ コンプライアンス( Compliance ) ] コマンドを選択します。
- プロパティのモードを次のように設定します。モードオフコンプライアンス制御を無効にします。
- モード:オフ
- 確認ボタンを押します。
- 4 行目で [ コンプライアンス( Compliance ) ] コマンドを選択します。
- プロパティの Mode を次のように設定します。モードオンでコンプライアンス制御を有効にします。
- モード:オン
- 剛性 (Stiffness) を次のように設定しますX 方向と Y 方向の剛性を低くすると、 X 方向と Y 方向の反応がソフトになります。
- X :200 N/m
- Y :200 N/m
- Z :3000 N/m (デフォルト)
- Rx 、 Ry 、 Rz :200 Nm/rad (デフォルト)
- 確認ボタンを押します。
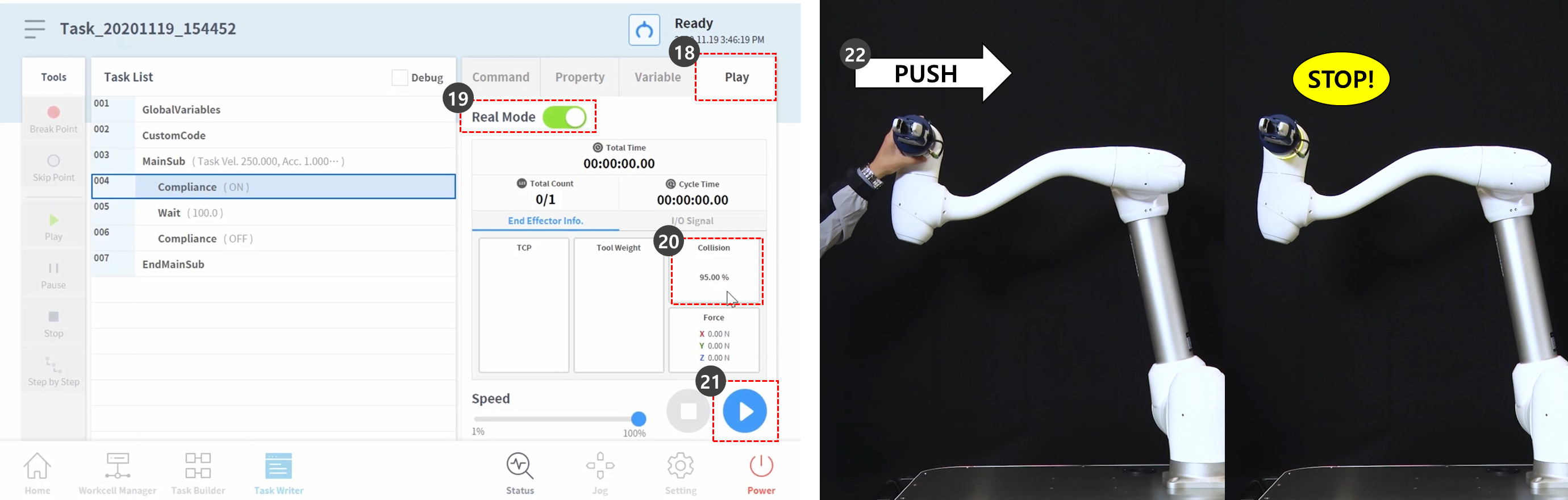
- [ 再生( Play ) ] タブを選択する。
- リアルモードトグルボタンを有効にします。
- 切り替えボタンが有効になると、ボタンが緑色に点灯します。
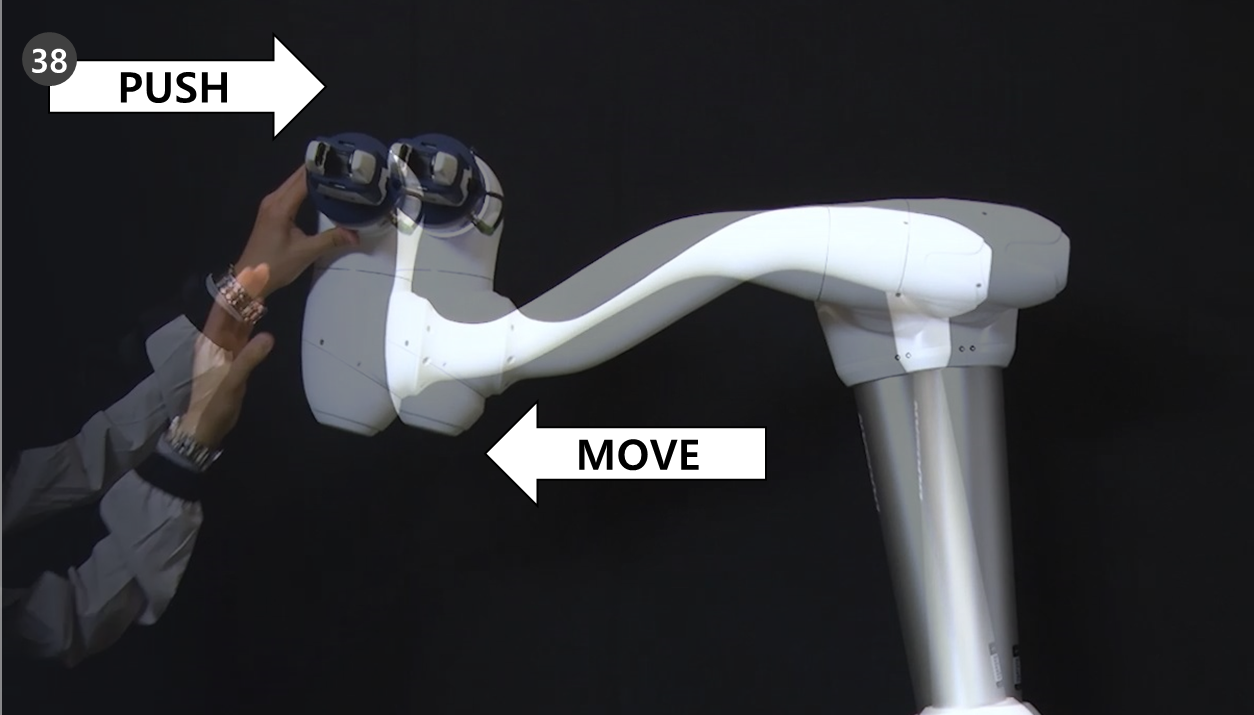
- このサンプルでは、安全停止を意図的に起動して、コンプライアンス制御中に衝突の感度を下げる理由を説明します。このサンプルの衝突感度は 95% です。このような衝突感度が高い場合、ロボットは衝突に対して非常に敏感に反応します。
- 衝突時、ロボットは安全停止によって停止します。
- 再生ボタンを押します。
- ロボットの端を持ち、ロボットボディの方向にゆっくりと押します。衝突エラーのため、ロボットが停止しました。衝突による安全停止中は、ロボット LED が黄色に点灯します。
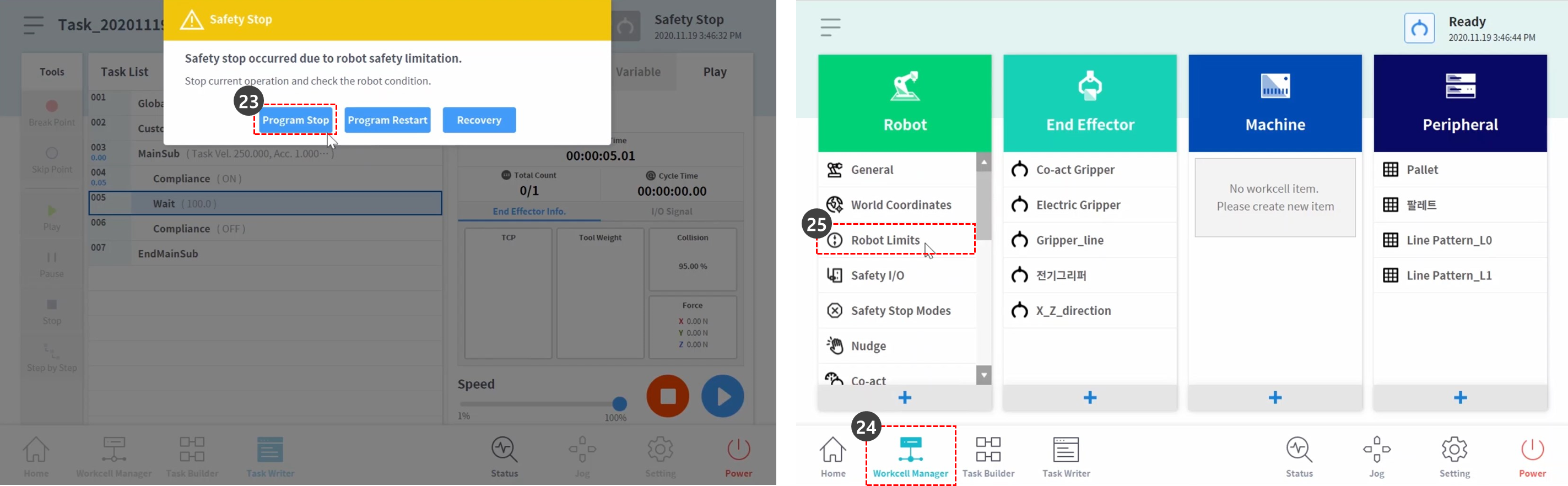
- 画面の黄色の安全停止警告ウィンドウにあるプログラム停止ボタンを押します。進行中のタスクプログラムが停止します。
- 下部のメニューからワークセルマネージャ (Workcell Manager) を選択します
- [ ロボット( Robot ) ]>[ ロボットの境界( Robot Limits )
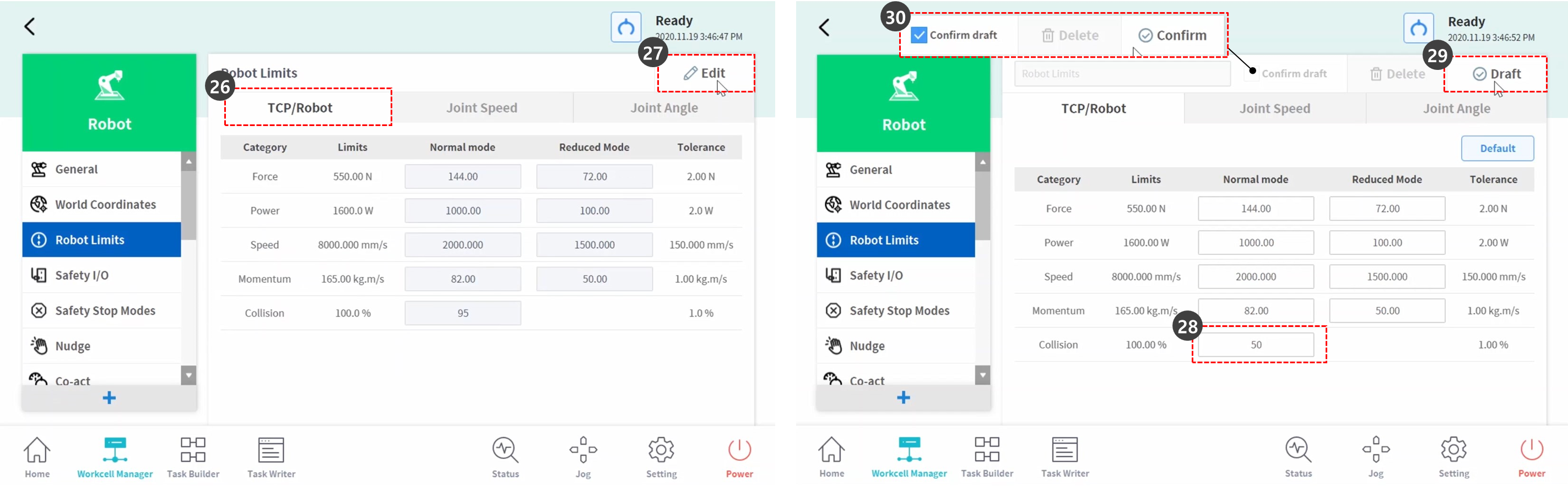
- [TCP/Robot] タブを選択します。
- [ 編集 ] ボタンを押します。
- 衝突感度( Collision Sensitivity )を次のように設定します。
- ノーマルモード:50%
- [ ドラフト ] ボタンを押します。
- [ 下書きの確認 ] チェックボックスをオンにして、 [ 確認 ] ボタンを押します。
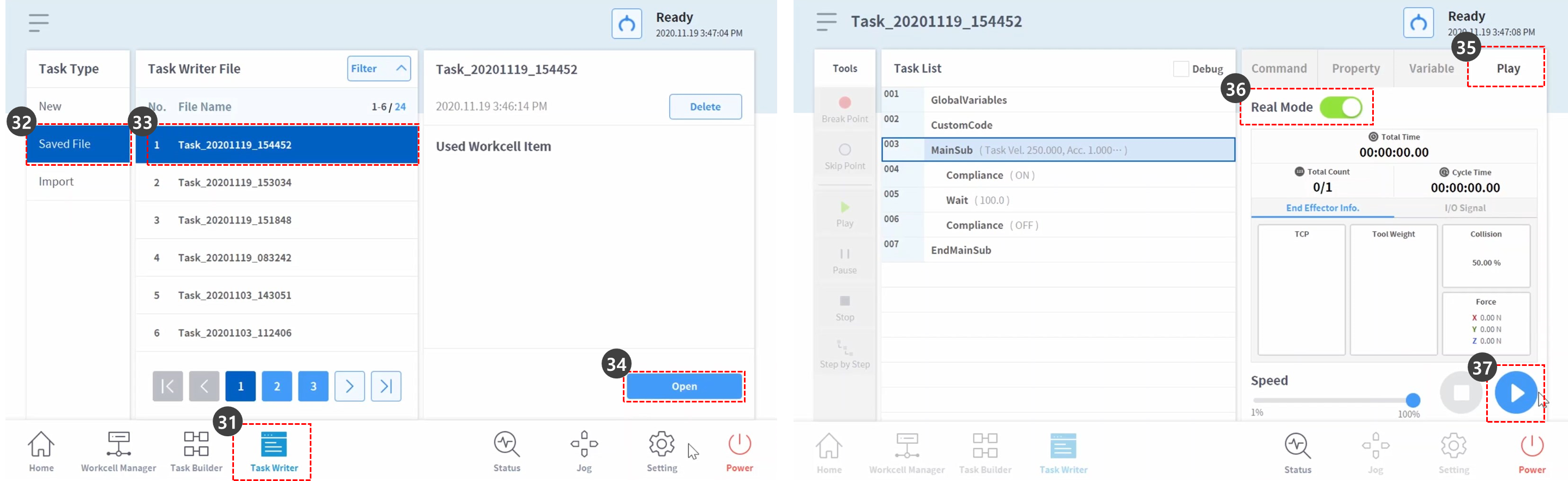
- 下部のメニューから Task Writer を選択します
- 画面左側で保存したファイルを選択します。
- を選択する前に、ステップ 2 で最初のタスクファイル名がタスク名であるかどうかを確認します。最後に保存したタスクは、 Task Writer ファイルリストの一番上にあります。
- [ 開く ] ボタンを押します。
- [ 再生( Play ) ] タブを選択する。
- リアルモードトグルボタンを有効にします。
- 再生ボタンを押します。
- ロボットの端を持ち、ロボットボディの方向にゆっくりと押します。ロボットは押し力により移動し、元の位置に戻ります。