
座標
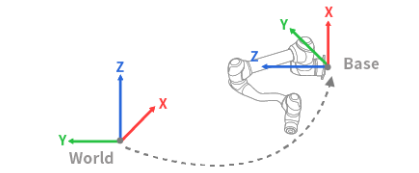
ワールド座標
ロボットのワールド座標は、ワールド座標から設定できます。ロボット座標がベース座標の場合、このステップはスキップできます。
ワールド座標は、Robot Parameters > Robot Settings > World Coordinatesで設定できます。
ロボットベースの設置場所を物理的に移動/回転する場合は、ワールド座標が使用されます。
ワールド座標を変更すると、同じ移動/回転がロボットシミュレータ画面に適用されます。
注記
ロボットティーチング後にベース位置や角度を変更した後でもワールド座標を使用できます。過去にロボットティーチングによって作成されたタスクの座標がベースからワールドに変更された場合、ワールド座標の移動/回転に対応するオフセットがすべてのモーション座標に適用されます。
メニュー
項目 | 説明 | |
|---|---|---|
| 1 | ロックトグルボタン | 設定値をロックするために使用します。設定値を変更するには、安全パスワードが必要です。 |
| 2 | 情報イメージ | これは、設定に必要な情報イメージです。 |
| 3 | 情報メッセージ | これは、設定に必要な情報メッセージです。 |
| 4 | 取り付けポーズ | このセクションでは、A、B、およびCの取り付けポーズの値について説明します。 |
| 5 | 点、直線、平面の設定 | ここでは、点、直線、平面から目的の項目を選択して設定できます。 |
| 6 | ティーチングガイド | これは、点、直線、および平面を設定するためのガイドです。 |
| 7 | 座標 | ここで、ベースとワールドの間で必要な座標を選択できます。 |
| 8 | ポイント1の設定 | ここでは、6つの軸のそれぞれの設定、およびGet Pose(ポーズの取得)とMove To(移動先)を設定できます。 |
| 9 | ティーチングポイントの適用ボタン | このボタンを使用すると、目的の設定を入力して適用できます。 |
| 10 | ワールドからベースへの座標のリセット | このボタンを使用すると、入力済みのワールド座標をリセットできます。 |
| 11 | ワールドからベースへの座標の設定 | ここで、6軸の設定を入力できます。 |
| 12 | [適用]ボタン | 設定値を適用できます。 |
ユーザー座標
メニュー
項目 | 説明 | |
|---|---|---|
| 1 | 新規追加 | このボタンを使用すると、選択したユーザー座標を削除できます。最大100のユーザー座標を追加できます。 |
| 2 | 削除 | このボタンを使用すると、選択したユーザー座標を削除できます。 |
| 3 | 選択したユーザー座標 | これは追加されたユーザー座標のリストです。 |
| 4 | ユーザー座標名 | ここで、ユーザー座標の名前を設定できます。101~200の数字を入力できます。最大長は40文字です。 |
| 5 | 点、直線、平面の設定 | ここで、各点、直線、平面を設定できます。 |
| 6 | 情報アイコン | ユーザー座標のガイドが提供されています。 |
| 7 | 座標 | ここで、必要な値の基準としてBaseまたはWorldを選択できます。 |
| 8 | ポイント1の設定 | ここでは、点1の6つの軸のそれぞれに値を入力し、[Get Pose]または[Move To]を実行できます。 |
| 9 | ティーチングポイントの適用 | このボタンを使用すると、入力後に必要な値を適用できます。 |
| 10 | ユーザー座標 | [ユーザー座標(User Coordinates)]セクションでは、必要な値をそれぞれ入力できます。 |
| 11 | 保存 | このボタンを使用すると、設定値を保存できます。 |