
リモートコントロールモジュール
リモートコントロールモジュールを使用すると、すでに作成したタスクに対してリモートコントロールを実行できます。
オペレータ権限では、リモートコントロールモードを開始できますが、IO設定を変更することはできません。IO設定は、管理者権限でのみ変更できます。
メニュー
項目 | 説明 | |
|---|---|---|
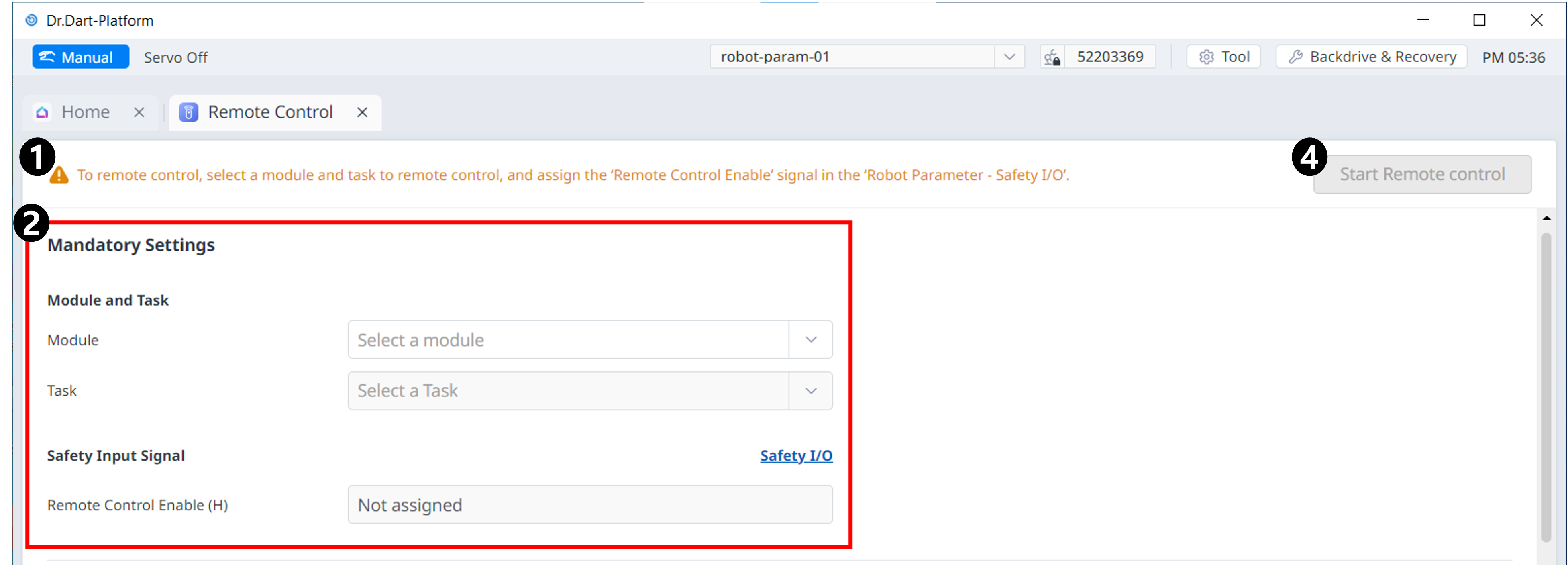
| 1 | 警告 | これにより、モジュールを使用する際に必要な注意事項が示されます。 |
| 2 | 必須設定 | これはリモートコントロールの必須設定です。 モジュールとタスクを設定し、安全入力信号を設定できます。 |
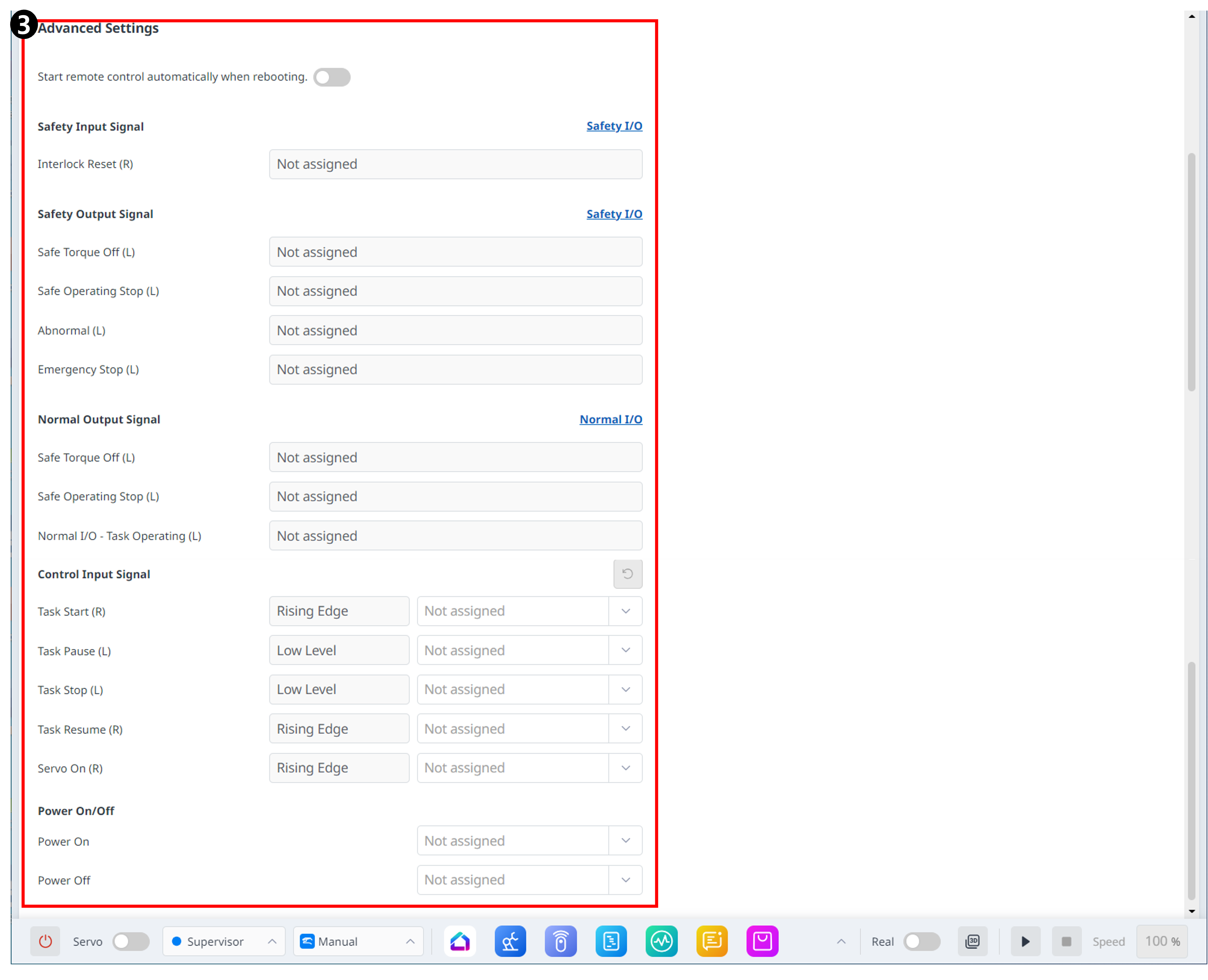
| 3 | 詳細設定 | これにより、リモートコントロールの詳細設定が可能になります。 タスクの各ポートをstart/pause/stop/resume/servo onに設定できます。 リモートコントロールが再起動後に自動的に実行されるように設定されている場合、DART-Platformの再起動と同時に実行されます。 |
| 4 | リモートコントロールの開始 | このボタンを使用すると、すべての設定が完了した後でリモートコントロールを開始できます。 |
構成アイテム
必須設定
[必須設定]で、リモートコントロールの実行に不可欠な項目を設定する必要があります。
リモートコントロール機能を有効にするには、これらの設定を完了する必要があります。
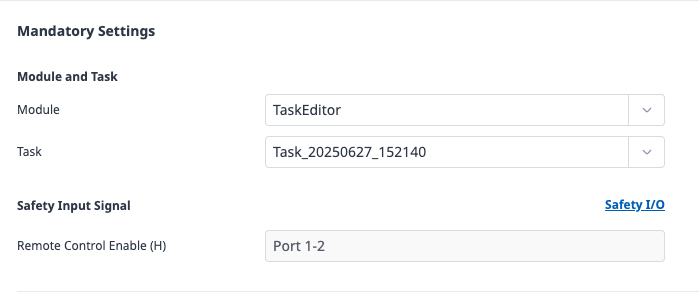
モジュールとタスクの選択
リモートコントロールをサポートするモジュールを選択し、そのモジュール内で制御するタスクを指定します。
安全入力信号
リモートコントロール有効信号を設定します。
これは、 ロボットパラメータ モジュールの安全I/Oタブで指定できます。
詳細設定
詳細設定では、リモートコントロール操作に必要なオプション機能を追加設定できます。
これらの設定はオプションであり、設定されていない場合でも、基本的なリモートコントロール機能を使用できます。
再起動時にリモートコントロールを自動的に起動します

トグルボタンがオンに設定されている場合、ロボットが再起動された後、システムは自動的にリモートコントロールモード画面に入ります。
高度な信号設定
次の信号はすべてオプションです。
一般的な注意事項
これらは必須項目ではありません。
同じポートと信号を冗長に割り当てることはできません。
安全入力信号

接続されたデバイスを初期化するためのインターロックリセット信号を設定します。
これは、 Robot Parameter ModuleのSafety I/O > Interlock ResetのInterlock Reset設定と同じように動作します。
安全出力信号
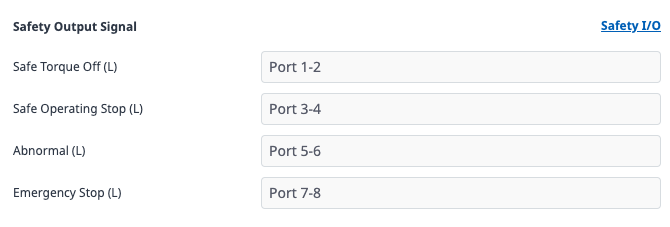
STO、SOS、および緊急停止信号に出力ポートを割り当てることができます。
ロボットパラメータ モジュールの安全出力信号セクションでSTO、SOS、または緊急停止がすでに設定されている場合は、これらの設定が適用されます。
注記
各信号の詳細については、 安全信号I/Oの セクションを参照してください。
通常の出力信号
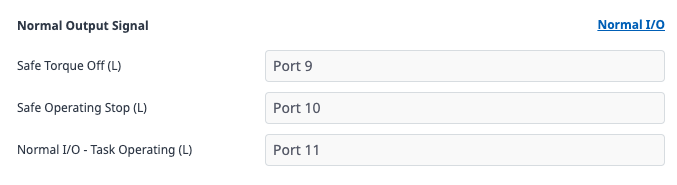
STO、SOS、およびタスク動作信号に出力ポートを割り当てることができます。
Robot Parameter モジュールのGeneral Output Signalsセクションで同じ信号がすでにコンフィグレーションされている場合は、それらの設定が適用されます。
コントロール入力信号
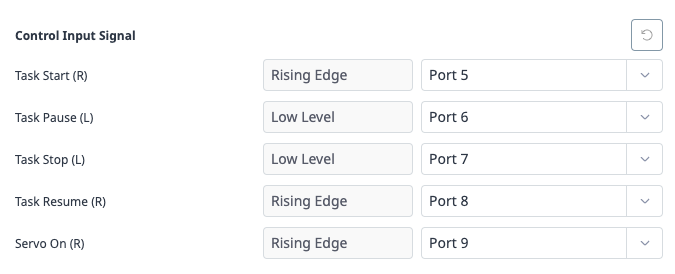
Start, Stop, Pause, Resume、およびServo Onコマンドに入力ポートを割り当てることができます。
リセットボタンを押して、制御入力信号の設定をクリアします。
電源オン/オフ

入力ポートを電源オン/オフに設定できます。
各信号ポートの横に表示される説明は、その信号の動作状態を示します。
立ち上がりエッジ
入力信号は上昇するとアクティブになります。
例えば、Task Start信号は、入力が0Vから24Vに上昇するとトリガーされます。
再試行するときは、最初に信号を0Vに戻す必要があります。
低レベル
ストップ信号はスタート信号よりも優先されます。
例えば、停止信号が低レベルの場合、タスク開始信号は無視され、 Remote IO signal ignored(リモートIO信号無視) メッセージが表示されます。