
フランジI/O
ロボットのエンドフランジカバーにはM8仕様の8ピンコネクタが1つあり、位置と形状については下図を参照してください。
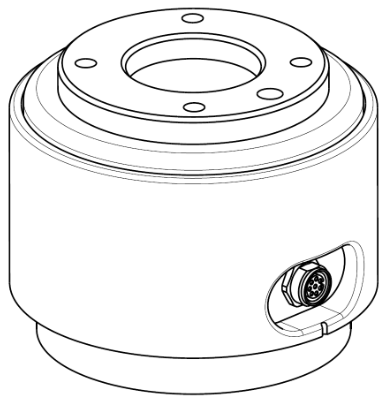
コネクタは、グリッパーまたは特定のロボットツールに組み込まれたセンサーを操作するために必要な電力と制御信号を供給します。次に、産業用ケーブルの例を示します(同等のケーブルを使用できます)。
Phoenix連絡先1404178、オス(ストレート)
Phoenixコンタクト1404182、オス(直角)
回路図
各コネクタのピンマップは次のとおりです。
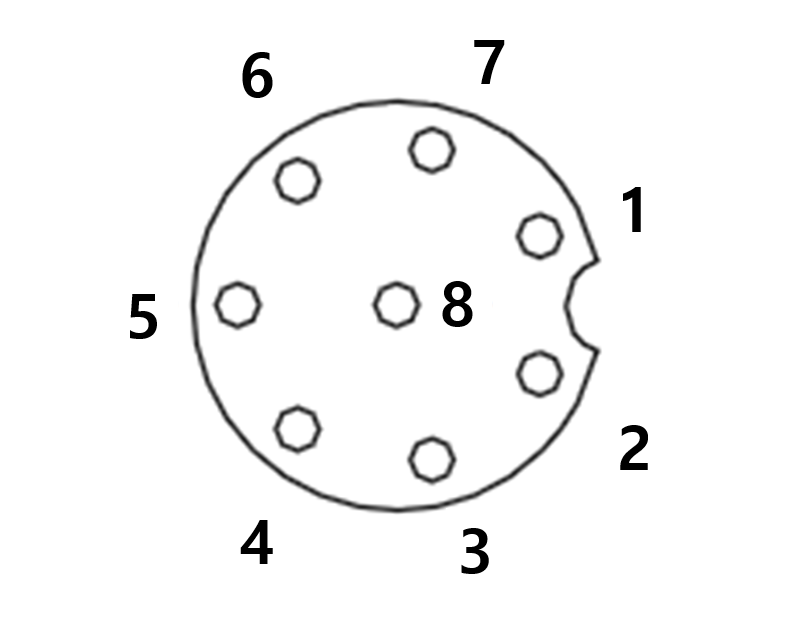
X1コネクタで提供されるI/O設定の詳細については、以下の表を参照してください。
X1設定
No. | 信号タイプ | 説明 |
|---|---|---|
1 | デジタル入力1 | PNP(ソースタイプ、デフォルト) |
2 | デジタル出力1 | PNP(ソースタイプ、デフォルト)またはNPN(シンクタイプ)のいずれかに設定します。 |
3 | デジタル出力2 | PNP(ソースタイプ、デフォルト)またはNPN(シンクタイプ)のいずれかに設定します。 |
4 | アナログ入力1/RS-485+ | 電圧(0-10V)または電流(4-20mA、デフォルト)/最大1Mボーレートに設定します。 |
5 | 電源 | 内部電源を+24V(デフォルト)、+12Vまたは0Vに設定します。 |
6 | アナログ入力2/RS-485- | 電圧(0-10V)または電流(4-20mA、デフォルト)/最大1Mボーレートに設定します。 |
7 | デジタル入力2 | PNP(ソースタイプ、デフォルト) |
8 | GND |
フランジ入出力(I/O)の初期電力は24Vに設定され、0Vまたは12Vに設定できます。
I/O接続時の詳細な電源仕様については、次の表を参照してください。
パラメータ | 最小 | タイプ | 最大 | 単位 |
|---|---|---|---|---|
供給電圧(12Vモード) | 11.4 | 12 | 12.6 | V |
供給電圧(24Vモード) | 22.8 | 24 | 25.2 | V |
供給電流 | - | - | 1.5 | A |
警告
電源切断時に何らかの危険が発生した場合に、工具とグリッパーを設置して危険を生じないようにします。
(工具から部材が落下するなど)各コネクタの5番端子は、ロボットに電力が供給されている間は常に24Vを出力しますので、工具やグリッパーの設定時には、ロボットへの電源供給を必ず遮断してください。
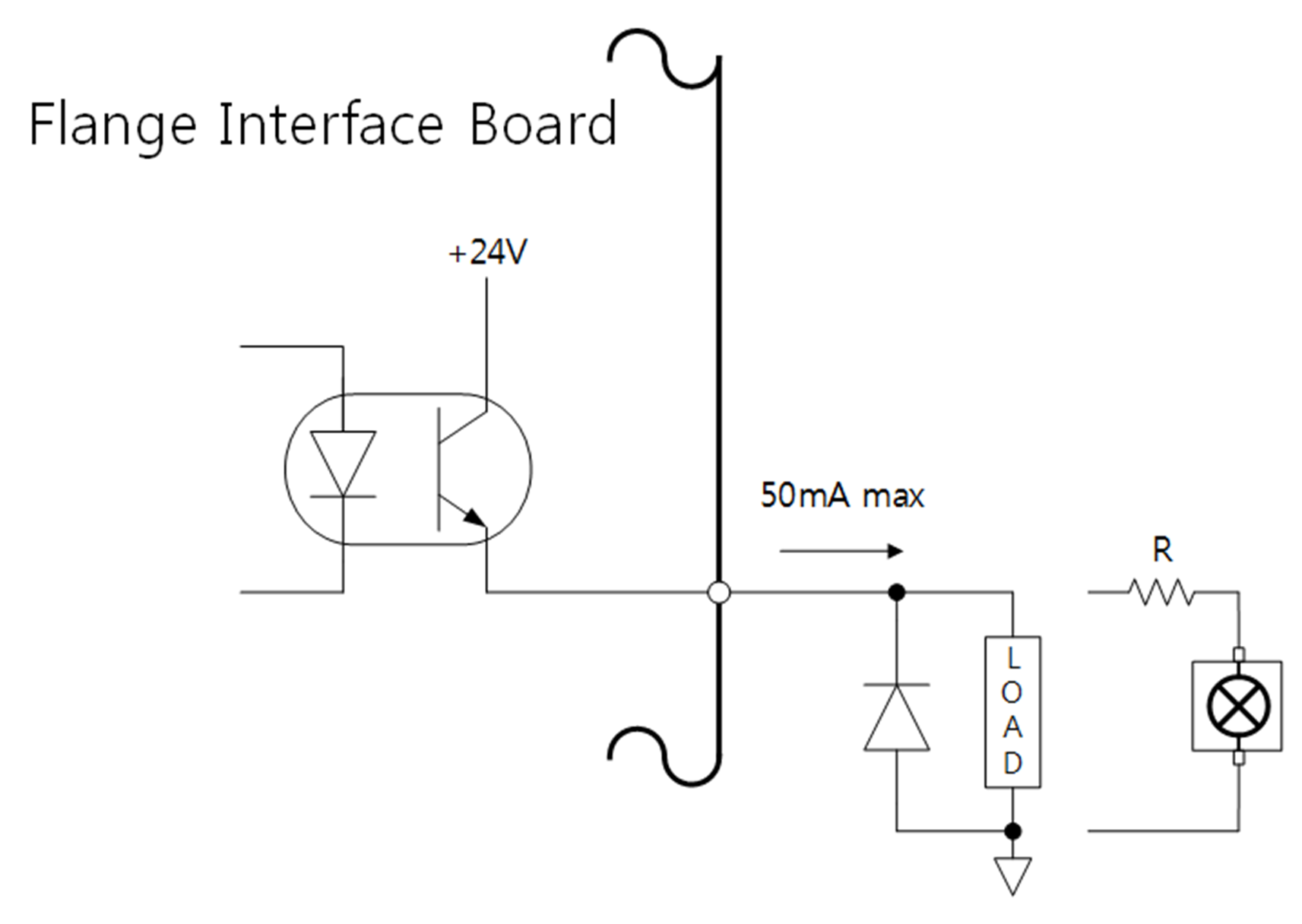
フランジデジタル出力仕様
フランジデジタル出力はPNP仕様で、出力にフォトカプラ出力が設定されています。
デジタル出力が有効になると、対応する出力チャネルは+24Vになります。デジタル出力がディセーブルの場合、対応する出力チャネルの状態はオープン(フローティング)になります。
デジタル出力の電気仕様は次のとおりです。
パラメータ | 最小 | タイプ | 最大 | 単位 |
|---|---|---|---|---|
10mA駆動時の電圧 | 23 | - | - | V |
50mA駆動時の電圧 | 22.8 | - | 23.7 | V |
走行時の電流 | 0 | - | 50 | mA |
2024年4月11日より、以下のように設定が変更されました。
デジタルOU出力は、次の2つの異なるモードをサポートします。
モード | アクティブ | 非アクティブ |
|---|---|---|
PNP(ソースタイプ、デフォルト) | 高 | 開く (Open) |
NPN(シンクタイプ) | 低 | 開く (Open) |
フランジ入出力(I/O)の初期電力は24Vに設定され、0Vまたは12Vに設定できます。
デジタル出力が有効になると、対応する出力チャネルは++12Vまたは++24Vになります。
デジタル出力がディセーブルの場合、対応する出力チャネルの状態はオープン(フローティング)になります。
デジタル出力の電気仕様は次のとおりです。
パラメータ | 最小 | タイプ | 最大 | 単位 |
|---|---|---|---|---|
12Vモード走行時の電圧 | 11.4 | 12 | 12.6 | V |
24Vモード走行時の電圧 | 22.8 | 24 | 25.2 | V |
走行時の電流 | 0 | - | 50 | mA |
注意
デジタル出力は電流制限の対象になりません。操作中に上記の仕様を無視すると、製品に永久的な損傷を与える可能性があります。
下図はデジタル出力の設定例ですので、ツールとグリッパーを接続しながら参考にしてください。
回路を設定する際は、必ずロボットの電源を切断してください。
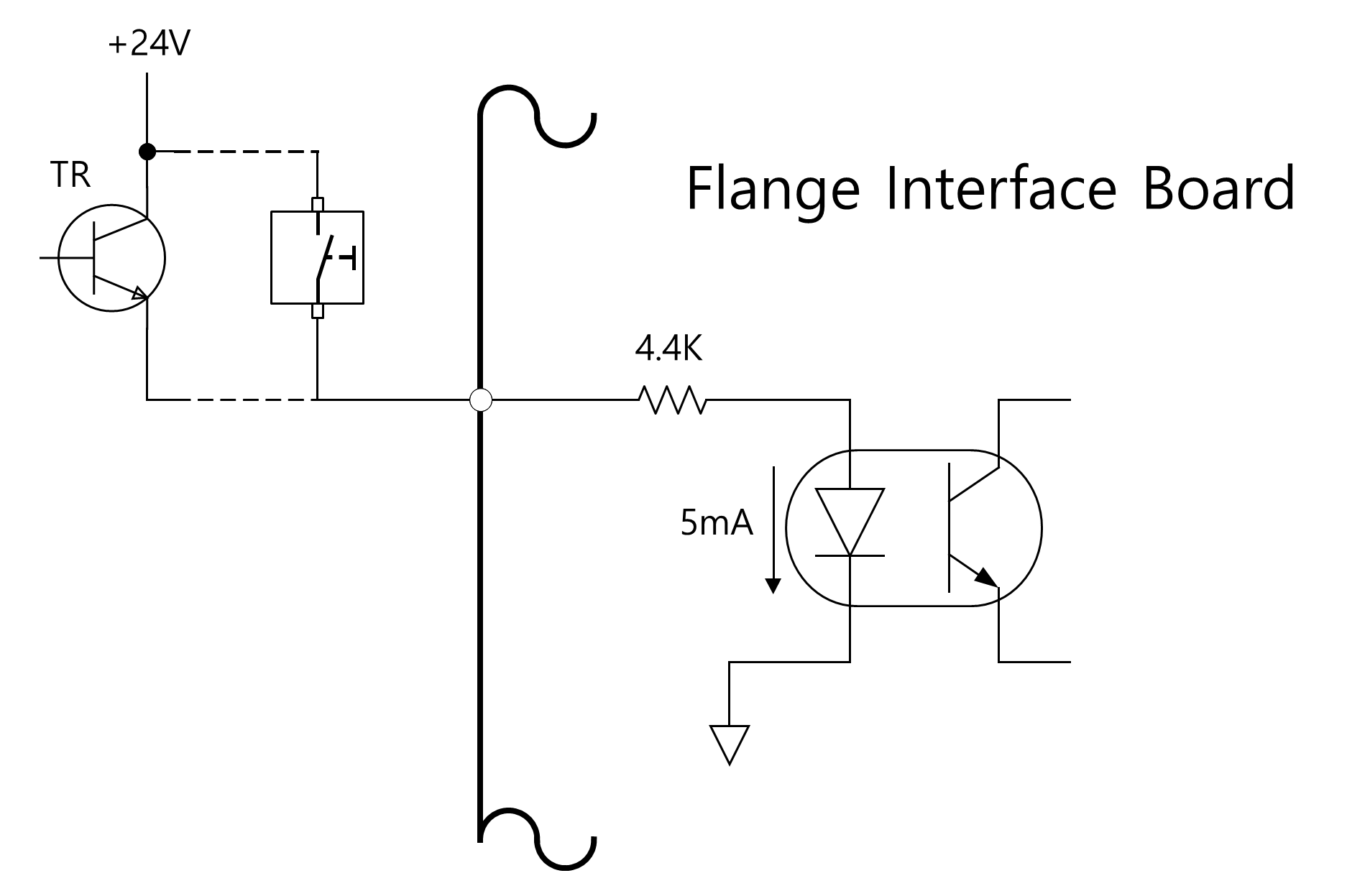
フランジデジタル入力仕様
フランジデジタル入力にはフォトカプラ入力があります。
24V入力に基づく電流は、内部抵抗によって5mAに制限されます。
デジタル入力の電気仕様は次のとおりです。
パラメータ | 最小 | タイプ | 最大 | 単位 |
|---|---|---|---|---|
入力電圧 | 0 | - | 26 | V |
論理高 | 4.4 | - | - | V |
論理Low | 0 | - | 0.7 | V |
入力抵抗 | - | 4.4k | - | Ω |
注意
下図はデジタル入力の設定例ですので、入力装置を接続する際に参考にしてください。
回路を設定する際は、必ずロボットの電源を切断してください。
フランジアナログ入力仕様
外部デバイスから電圧または電流信号を受信します。
アナログ入力は電圧(0~10V)または電流(4~20mA)に設定できます。
電気仕様を以下に示します。
パラメータ | 最小 | タイプ | 最大 | 単位 |
|---|---|---|---|---|
電圧モードの入力電圧 | 0 | - | 10 | V |
電流モードの入力電流 | 4 | - | 20 | mA |
解像度 | - | 12 | - | ビット |