
バックドライブ(パリティビット) モジュール
バックドライブはモーターに供給される電力を遮断し、ブレーキのみを解放してロボットのジョイントを外力で動かすことができます。この機能は、ロボットが リカバリ モードまたはハンドガイドで通常の状態に戻れない場合に使用されます。 バックドライブ モードでは、ユーザーは各ジョイントのブレーキを作動または解除できます。

バックドライブモジュールにアクセスするには、下部にあるバックドライブボタンをタップします。
メニュー
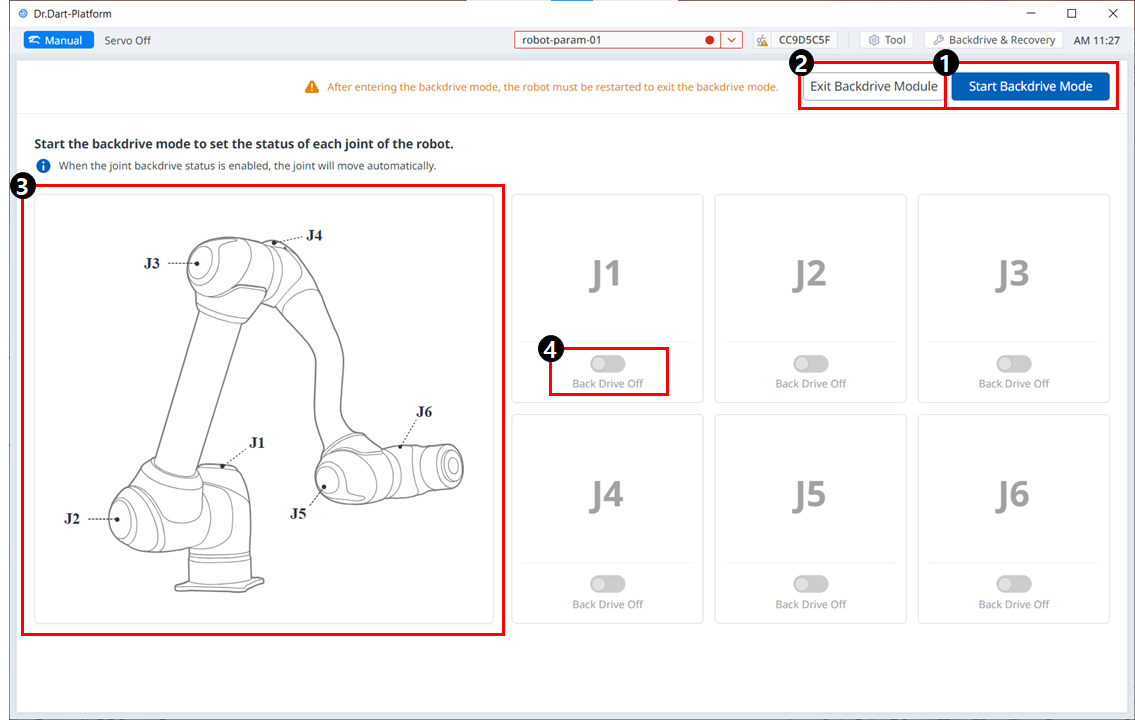
項目 | 説明 | |
|---|---|---|
| 1 | バックドライブモードの開始 | このボタンを使用すると、バックドライブモードを実行できます。 |
| 2 | バックドライブを終了 | このボタンを使用すると、バックドライブモジュールを終了できます。 |
| 3 | ジョイントイメージ | これは各ジョイントの位置を示す画像です。 |
| 4 | オン/オフ切り替えボタン | ジョイントごとに有効にするかどうかを選択できます。 |
バックドライブ モードの設定プロセスは次のとおりです。
メインメニューのステータスボタンをタップします Backdrive ボタン。
バックドライブ ボタンが有効になっていない場合は、緊急停止ボタンを押して放すか、 サーボオフボタンを押すと 有効になります。
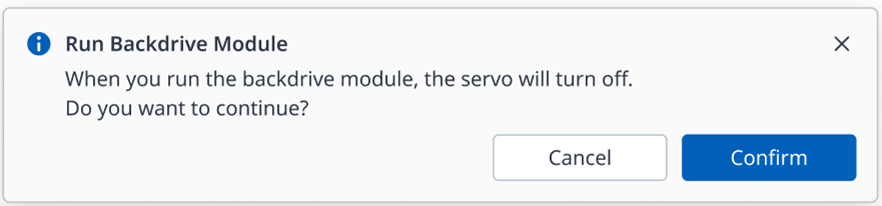
サーボオン 状態では、次のポップアップウィンドウが表示され、サーボが自動的に無効になります。
Backdrive画面のStart Backdrive Modeボタンをタップします。
「OFF/ON(オフ/オン)」ボタンを押すと、各ジョイントのブレーキが解除されます。

ジョイントのブレーキをオフ(解除)に設定し、力をかけてロボットを移動します。
ジョイント内の減速機の減速比により、マニピュレーターの重量によるジョイントのたるみ速度が高くなく、力をかけたときの移動速度も高くありません。
減速機が故障した場合、または無重力動作中にジョイントが一定の速度より速い速度で移動した場合、すべてのジョイントのブレーキが自動的にかけられ、安全性が確保されます。
位置変更が完了したら、ブレーキをオン(ホールド)にします。
メインメニューの電源をタップしてオペレーティングシステムをシャットダウンし、ティーチペンダントの上部にある電源ボタンを長押ししてシステムをシャットダウンし、もう一度押してシステムの電源を入れます。
バックドライブ ステータスが解除され、正常に作業を再開できます。
注記
各ジョイントを、順番に個別に通常の作業範囲に戻します。
バックドライブ モードが実行された場合、通常の作業を再開するにはシステムを再起動する必要があります。
バックドライブ モード時の軸の位置によっては、一時的にたるみが生じる場合がありますのでご注意ください。