
ロボットをインストールする準備ができました
ロボットの固定
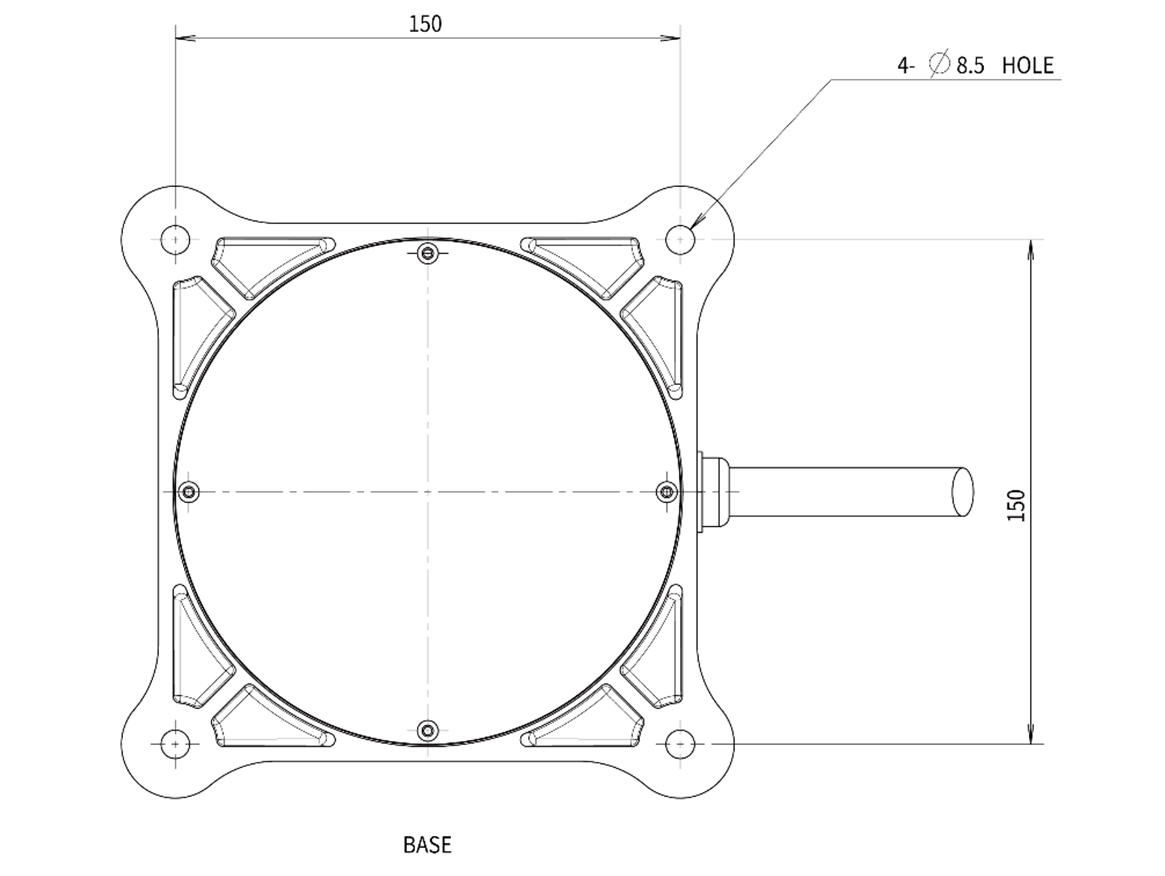
マニピュレータベースの4つの8.5 mm穴にM8ボルトを使用して、ロボットを固定します。
ボルトの締付けトルクは20 Nmを推奨します。振動による緩みを防ぐためにワッシャ(スプリングフラット)を使用してください。
φ 5プレイスマーカーピンを使用して、ロボットを正確に固定位置に設置します。
マニピュレータベース図面と4本のM8ボルトが使用されます。単位[mm]
警告
マニピュレータの操作中に緩むのを防ぐために、ボルトを完全に締め付けます。
マニピュレータベースは、運転中に発生する負荷(最大トルクの10倍、ロボットの重量の5倍)に耐えることができる固体表面に取り付けます。
ロボットはマニピュレータベースの振動を衝突と解釈し、緊急停止を作動させます。そのため、設置位置が自動的に移動する場合は、移動加速の高い場所にロボットベースを設置しないでください。
適切な方法を使用して、マニピュレータアームを特定の場所に取り付けます。実装面はソリッドでなければなりません。
マニピュレータは、長時間水に触れると破損します。濡れたり水中に入ったりする可能性のある状況では、ロボットを操作しないでください。
ケーブルの配置
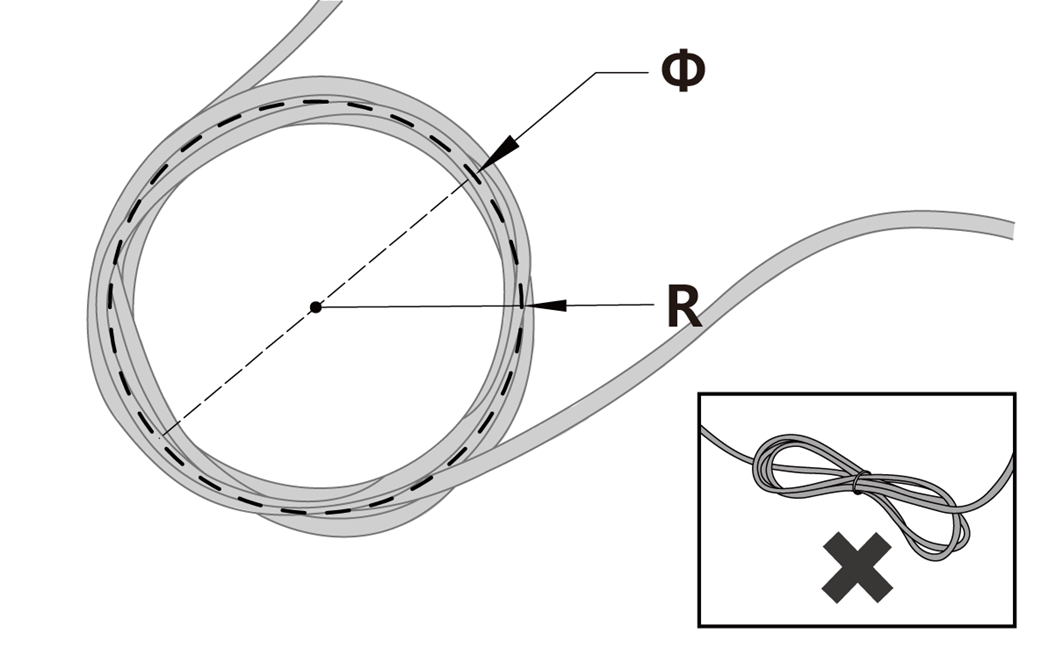
ケーブルの曲率が最小曲率半径より大きいことを確認する。各ケーブルの最小曲率半径は次のとおりです。
ケーブル (Cable) | 最小曲率半径(R) |
|---|---|
ティーチペンダントケーブル | 120 mm |
ロボットケーブル | 120 mm |
注意
ティーチペンダントケーブルとティーチペンダントコネクタ間の曲率半径が最小曲率半径より大きいことを確認してください。
曲率半径が最小曲率半径よりも小さい場合、ケーブルが切断されたり、製品が損傷する可能性があります。
電磁ノイズが発生する可能性のある環境では、誤動作を防ぐために適切なケーブルを取り付ける必要があります。