
Sub/Call Subの概要
Subはサブルーチンの略語です。サブルーチンとは、2つ以上の重複するパーツが存在する場合に必要なパーツを呼び出すことによって、プログラム内のステップ数を最小限に抑えるプロセスのことで
Doosan Roboticsロボットは、サブコマンドと対応するサブ段落を呼び出すCallSubコマンドを提供します。
SubコマンドはPythonで定義されているように機能します。
注記
Sub段落はMain段落の先頭のMainSubと、Main段落の末尾のEndMainSubに追加する必要があります。
繰り返しに加えて、Subコマンドはメイン段落を単純化するためにも使用されます。Subコマンドを使用すると、メイン段落のどのタスクが現在実行されているかを直感的に識別できます。
Subコマンドを使用すると、Sub段落単体テストが可能になります。
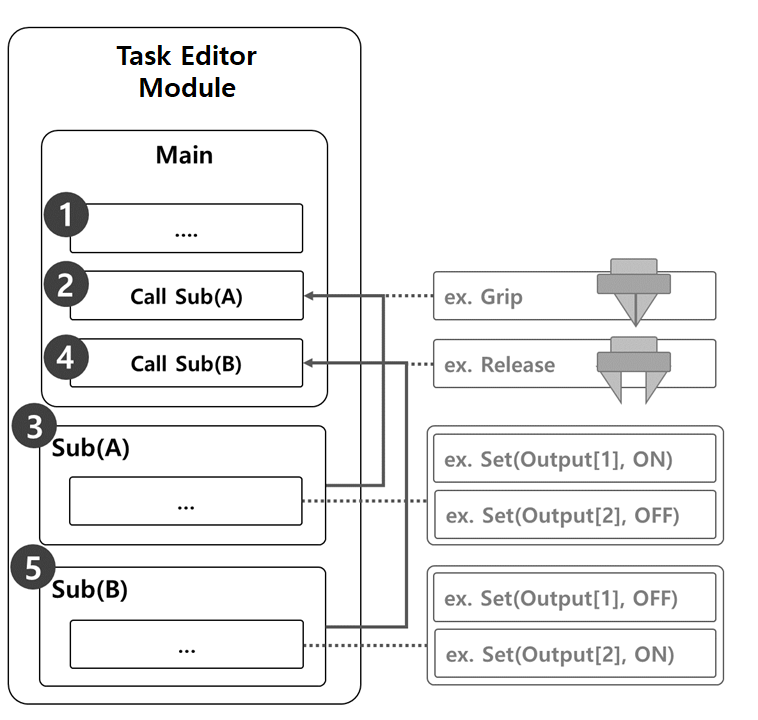
ロボットグリッパーのグリップ動作とリリース動作を実行するためにSubコマンドを使用するサンプルは、次のとおりです。
Main段落の行は、最初の行から順番にタスクプログラムを実行します。
Call Subによって呼び出されたSub(A)に移動します。
サンプル
プログラム:Gripサブルーチンを呼び出します。
ロボット:動作なし
Sub(A)が実行されます。すべてのSub段落行は順番に実行され、メイン段落に戻り、次の行が実行されます。
サンプル
プログラム:Gripサブルーチン行を順番に実行します。Setコマンドを使用して、Output[1]をOnに、Output[2]をOffに設定します。
ロボット:ロボットグリッパーは、グリップ動作を実行します。
Call Subによって呼び出されたSub(B)に移動します。
サンプル
プログラム:Releaseサブルーチンを呼び出します。
ロボット:動作なし
Sub(B)が実行されます。すべてのSub段落行は順番に実行され、メイン段落に戻り、次の行が実行されます。
サンプル
プログラム:Gripサブルーチン行を順番に実行します。Setコマンドを使用して、Output[1]をOffに、Output[2]をOnに設定します。
ロボット:ロボットグリッパーはリリースモーションを実行します。
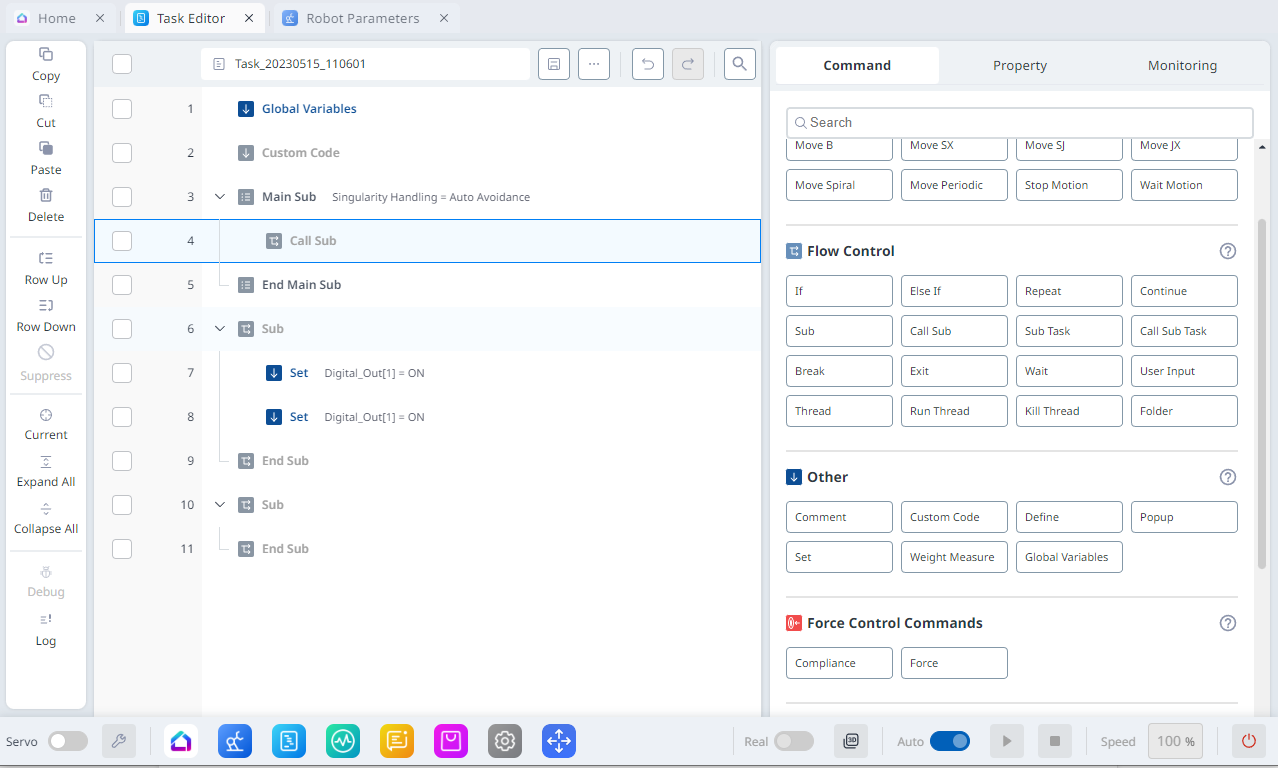
Subマンド追加
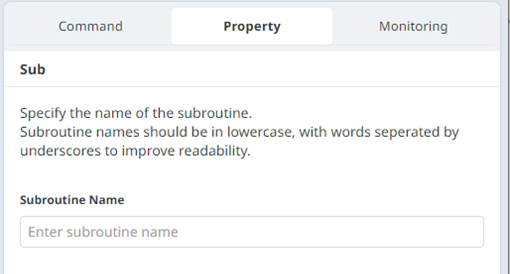
タスクエディタモジュールの右側のコマンドメニューのフロー制御セクションで、サブコマンドを追加します。
サブルーチン名を入力します。
CallSubマンド追加
Task Editorモジュールの右側のコマンドメニューのFlow Controlセクションで、Call Subコマンドを追加します。
Subコマンドで登録されているサブルーチン名を選択します。
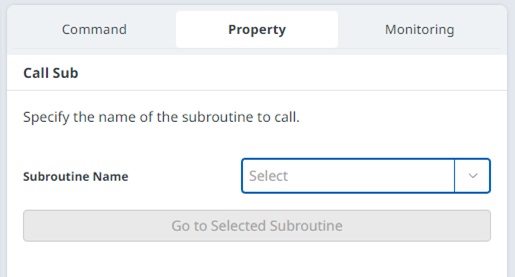
注記
タスクプログラムの行数が増えると、サブルーチンを見つけるのが難しくなることがあります。このような場合は、CallSubコマンドのプロパティでGo to Selected Subroutineをタッチして、対応するSubコマンドラインにフォーカスを移動します。