
リカバリモジュール
リカバリモジュール:継続的な安全違反でエラーが発生した場合、またはロボットを輸送のために梱包する必要がある場合、ユーザーは安全回復モードを使用してロボットの位置と角度を設定できます。

回復モジュールにアクセスするには、下部にある回復ボタンをタップします。
ソフトウェアリカバリ:サーボオフ状態では、ロボットが操作領域から出たり禁止領域に違反したりするなど、位置関連の安全違反による安全違反エラー状況が発生したり、固定物との衝突で ロボットが停止したときに継続的に力が加えられたりした場合、Jogまたはプログラムを使用してロボットを通常の状態にリセットしようとしても、サーボオンまたはジョグを設定できません。このような場合、 ソフトウェアリカバリ モードを使用してロボットを通常にリセットします。
パッケージングモード:ロボットのパッケージングおよび搬送の場合、搬送用に事前定義された値(通常の操作角度制限を超える値)にロボットを設定できます。
リカバリモジュールを起動したときにサーボが有効になっている場合は、次のポップアップが表示され、サーボは自動的にオフになります。
ソフトウェアリカバリモードの使用
ソフトウェアリカバリモード
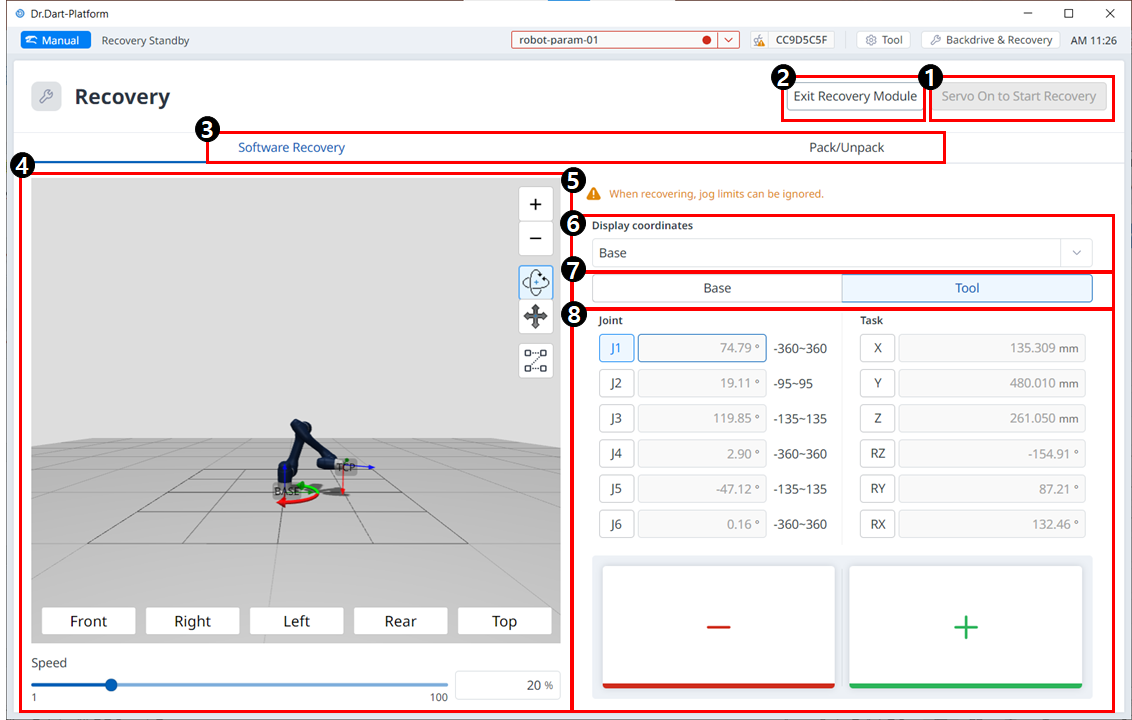
メニュー
項目 | 説明 | |
|---|---|---|
| 1 | サーボオンでリカバリを開始 | これは、リカバリモードに入る前にサーボを有効にするためのボタンです。 |
| 2 | リカバリの終了 | このボタンを使用すると、リカバリ モジュールを終了できます。 |
| 3 | ヘッダー | このセクションでは、ソフトウェアリカバリモードまたはパック/アンパックモードのいずれかを選択できます。 |
| 4 | 3Dシミュレーション | この領域では、設定値の3Dシミュレーションをプレビューできます。 |
| 5 | 警告メッセージ | ここでは、注意事項について説明します。 |
| 6 | 座標を表示 | ここでは、ベースまたはワールドに基づいて座標を設定できます。 |
| 7 | ベース/ツールボタン | ここで、ベースまたはツールに基づいて値を設定できます。 |
| 8 | ジョイント/タスク | このセクションでは、ロボットを移動するために必要な値を入力できます。 |
ソフトウェアリカバリモードを使用するには、次の手順を実行します。
ヘッダーペインの[リカバリ]メニューをタップします。[Recovery]ウィンドウに[Software Recovery]画面が自動的に表示されます。
Software Recovery画面の右側にある各ジョイントボタンをタップし、
 ボタンを使用して位置を設定します。または、コックピットのボタンを押して、直接ティーチングでジョイント角度を調整します。
ボタンを使用して位置を設定します。または、コックピットのボタンを押して、直接ティーチングでジョイント角度を調整します。コックピットのボタンの定義については、「 コックピット」を参照してください。
設定に加えた変更は、左側のシミュレーションウィンドウにリアルタイムで反映されます。
設定が完了したら、左上のXボタンをタップしてウィンドウを閉じます。
注意
ジョイント角度制限を3度超えた場合、ソフトウェア修復モードは使用できません。
パック/アンパックの使用
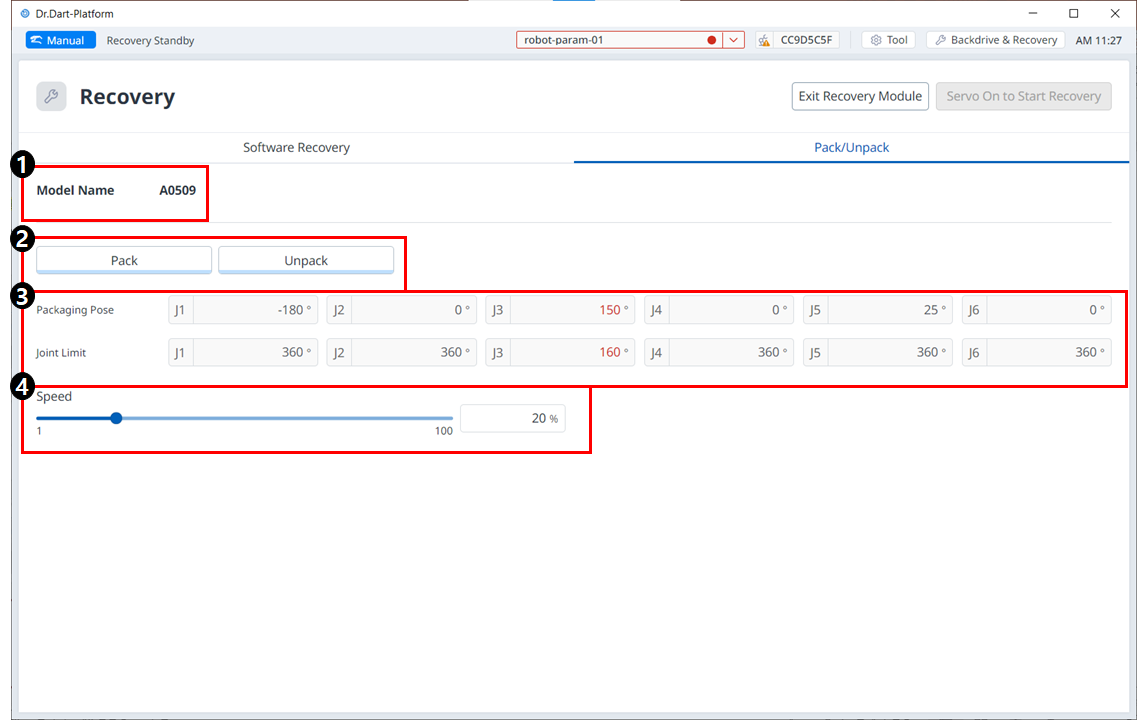
メニュー
項目 | 説明 | |
|---|---|---|
| 1 | モデル名 | 接続されたロボットモデルの名前が表示されます。 |
| 2 | パック/アンパック | パックまたはアンパックのいずれかを選択できます。 |
| 3 | パッケージングポーズ/ジョイント制限 | ポーズとジョイントの制限値が表示されます。 |
| 4 | 速度比 | パックモードまたはアンパックモードの速度は、スライダまたは入力を使用して調整できます。 |
パッケージングモードを設定するには、次の手順を実行します。
ヘッダーペインの[リカバリ]メニューをタップします。

パッケージングモード タブを選択します。

[Servo On](サーボオン) ボタンをタップして、パッケージングモードを有効にします。

ロボットは自動的に設定されたパッケージングポーズに移動します。
[パック(Pack)] ボタンを使用すると、ロボットを[パック(Pack)]位置に配置でき、[パック 解除(Unpack)] ボタンを使用すると、ロボットをデフォルトの[ホーム位置(Home Position)]に配置できます。