
ジョグパネル
メニュー
項目 | 説明 | |
|---|---|---|
| 1 | パネルタイプの選択 | 移動ボタンの位置を選択できます。 |
| 2 | 3Dシミュレーション | これは3Dビューアーで、ロボットがどのように見えるかを確認できます。 |
| 3 | シミュレータの位置合わせ | このセクションを使用してシミュレータを操縦できます。 |
| 4 | 増分を使用 | このボタンを使用すると、角度または位置の増分を有効にできます。 |
| 5 | 角度増分 | このセクションでは、選択した軸の角度増分が設定されます。 |
| 6 | 位置増分 | このセクションでは、選択した軸の位置増分が設定されます。 |
| 7 | 衝突 | このフィールドでは、ロボット衝突を設定します。 |
| 8 | 強制監視 | このセクションでは、ベース、ツール、ワールド、リファレンスなどに基づいて、X、Y、Z軸の力を設定します。 |
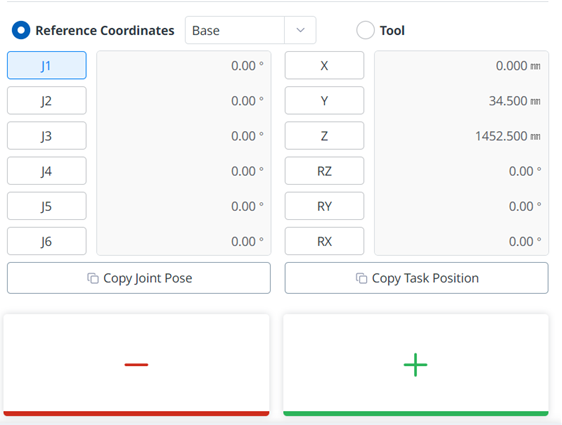
| 9 | 参照座標系を選択してください | 図11のタスク座標に使用する参照座標系を選択します。ベース座標、ワールド座標、またはユーザー座標を選択できます。 |
| 10 | ジョイントパネル | ジョグするジョイント軸を選択できます。 |
| 11 | タスクパネル | ジョグするタスク軸を選択できます。 |
| 12 | [Copy Pose J]ボタン | このボタンを使用すると、ポーズJをコピーできます。 |
| 13 | [Copy Pose X]ボタン | このボタンを使用すると、ポーズXをコピーできます。 |
| 14 | 移動ボタン | ロボットを各軸に基づいて-方向に移動させることができます。このとき、左側の3Dシミュレーションで-と+の方向を把握できます。 |
| 15 | 移動+ボタン | 各軸に基づいてロボットを+方向に移動させることができます。このとき、左側の3Dシミュレーションで-と+の方向を把握できます。 |
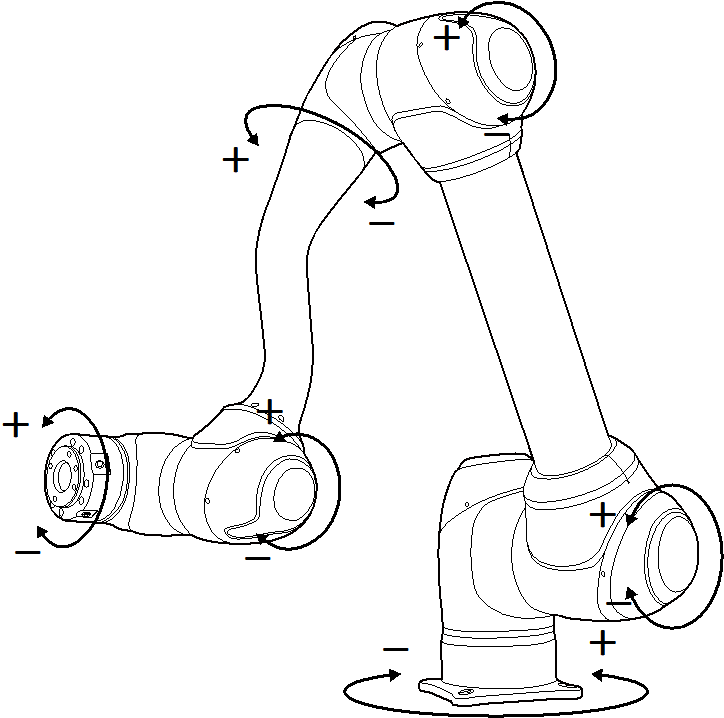
ロボットジョイントに基づいて実行
ロボットジョイントに基づいて角度を調整するには、次の手順を実行します。
軸(J1-J6)を選択して、ジョイントパネルの角度を調整します。
方向ボタン(
 ,
,  )を押したままにして、対応する軸の角度を調整します。
)を押したままにして、対応する軸の角度を調整します。
ロボットベースに基づく実行

ベース座標に基づいてロボットを移動するには、次の手順を実行します。
基準座標系としてベース(Base)を選択します
タスクパネルで、角度を調整する軸(X~RX)を選択します。
方向ボタン(+、-)を押したままにして、対応する軸を移動します。
ワールド座標に基づく実行

ワールド座標に基づいてロボットを移動するには、次の手順を実行します。
参照座標系としてワールドを選択します
タスクパネルで、角度を調整する軸(X~RX)を選択します。
方向ボタン(+、-)を押したままにして、対応する軸を移動します。
ロボットツールに基づく実行

ロボットツールに基づいてロボットを移動するには、次の手順を実行します。
参照座標系としてツールを選択します
タスクパネルで、角度を調整する軸(X~RX)を選択します。
方向ボタン(+、-)を押したままにして、対応する軸を移動します。
注記
仮想モードでは安全領域は適用されません。
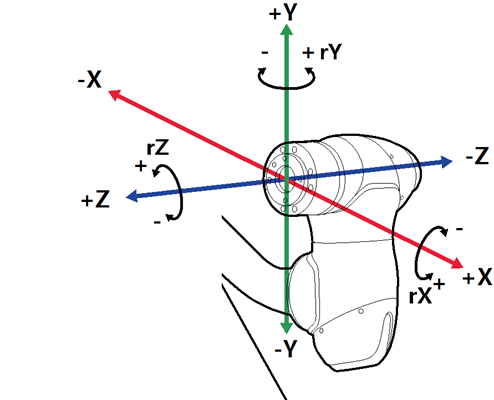
Rx、Ry、RzはTCP(ツールの中心位置)に従って実行されます。