
整列パネル
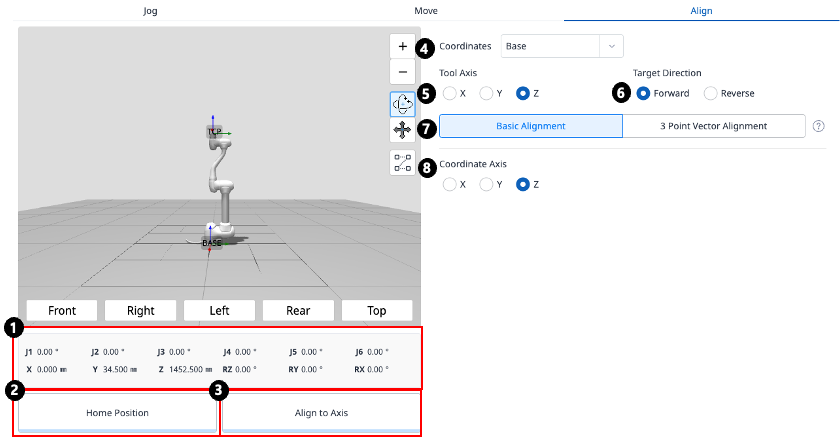
メニュー
項目 | 説明 | |
|---|---|---|
1 | ロボットの姿勢 | 現在のロボットのジョイント姿勢とタスク姿勢を表示する。 |
2 | ホームポジションボタン | クリックしたときにロボットをホーム位置に移動する。 |
3 | [整列]ボタン | クリックしたときにロボットを位置合わせする。 |
4 | 参照座標系を選択 | 位置決めの基準座標系を選択する。 |
5 | ツール軸 | 位置合わせするTCPの軸を選択する。 |
6 | ターゲットの方向 | TCPを位置合わせする方向を選択する。 |
7 | 位置合わせ方法 | 位置合わせ方法を選択する。 |
8 | 座標軸 | 基準座標系のどの軸に整列させるかを選択する。 |
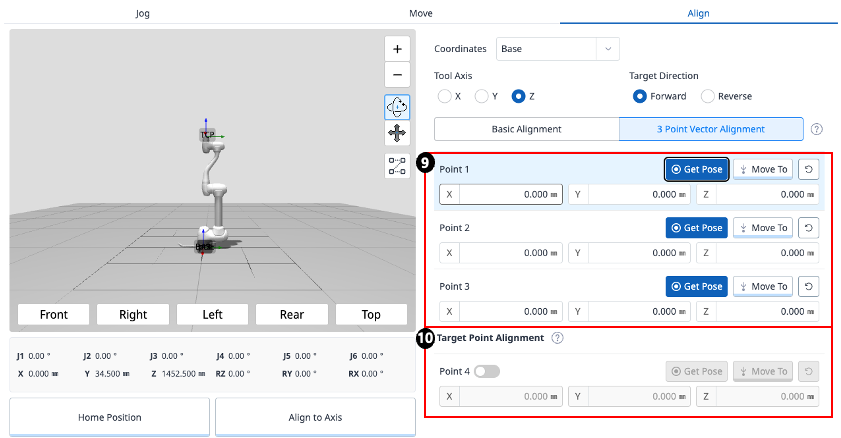
9 | 平面上の点を選択 | 平面を定義する3点を選択する。 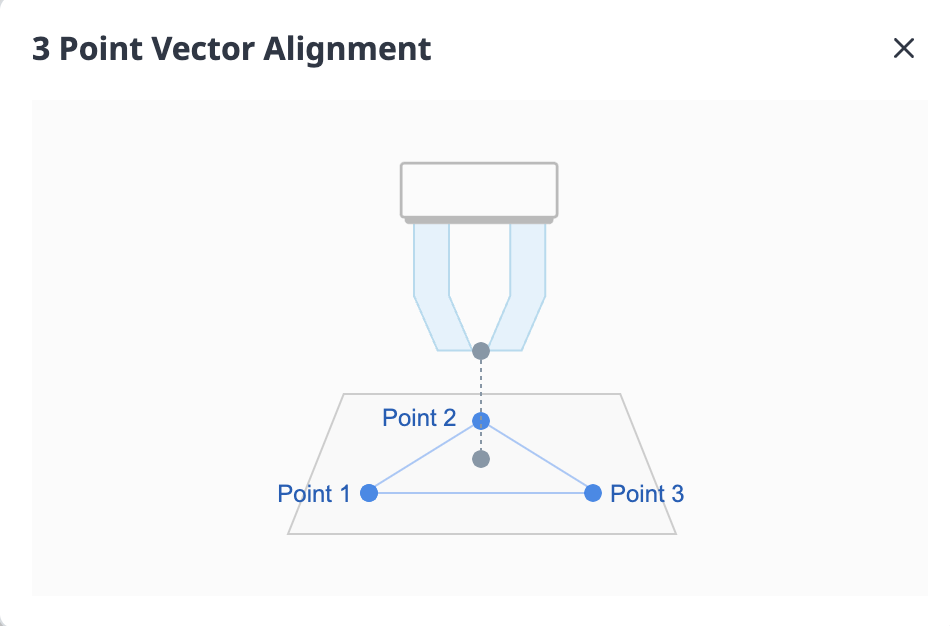 |
10 | ターゲット点の位置合わせ | TCPを配置する点を選択する。 |