
サーボオンの概要
サーボオンと は、ロボットアームがジョイントに電力を供給することで操作できるスタンバイ状態のことです。緊急停止ボタンを押すか、重大な安全制限に違反すると 、サーボオフ ステータスが設定されます。サーボオフ状態では、ジョイントの電源がオフになり、ロボットアームを駆動できず、 メインメニューでロボットアームドライブに関連付けられたタスクエディター(Task editor)、ジョグプラス(Jog Plus)が無効になります。
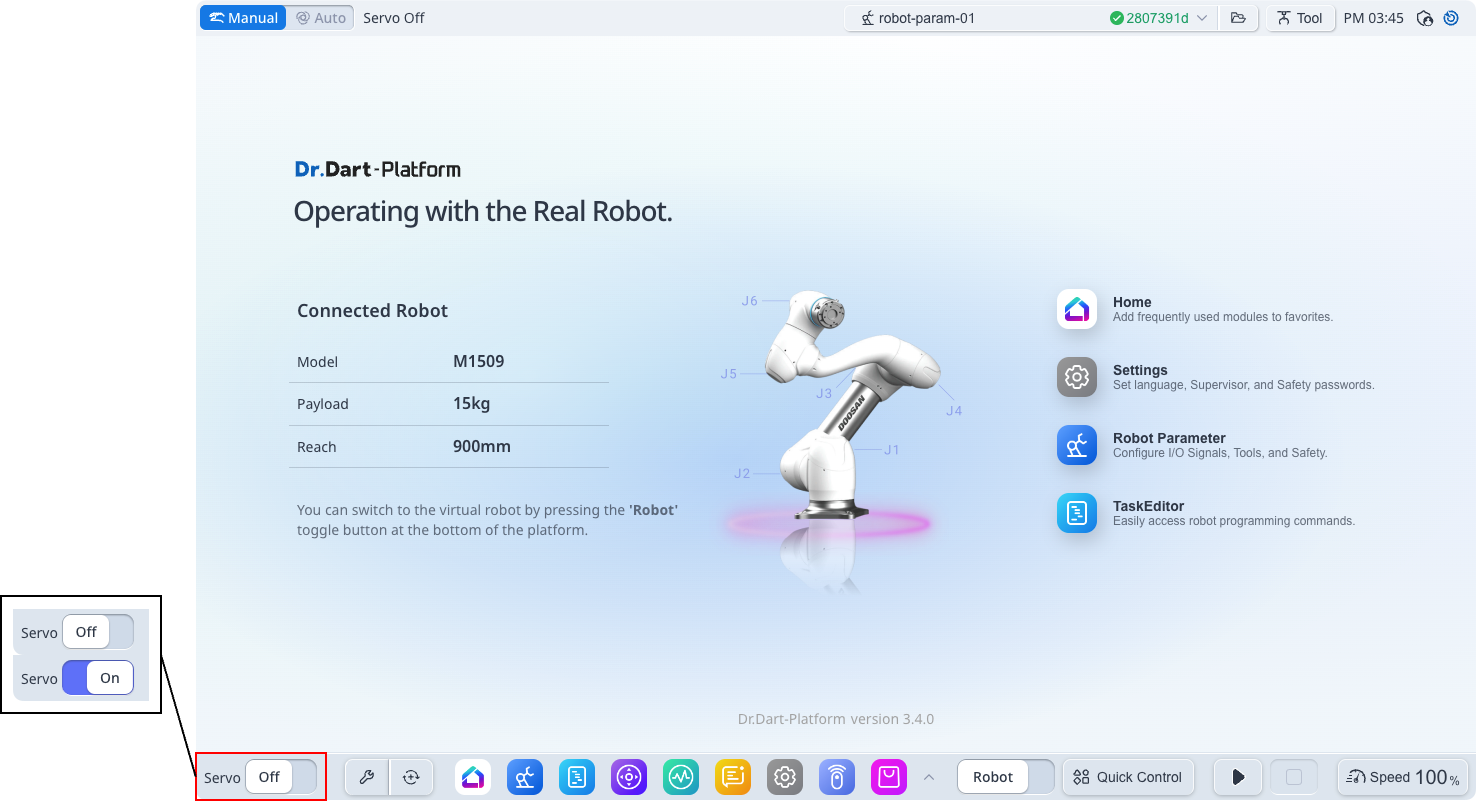
サーボオフからサーボオンに切り替えるには、下部のメインメニューの左側にあるサーボボタンをタップします。