初期起動
コントローラーの電源を入れる
必須 簡単 1 MIN
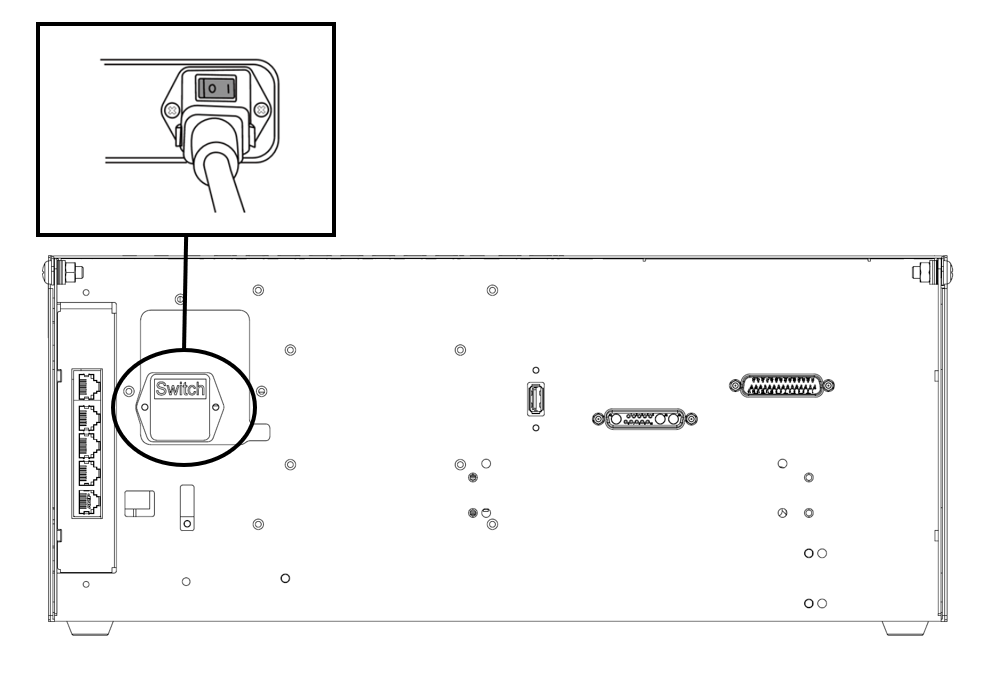
コントローラーの下部にある電源スイッチを押します。ロボット、コントローラ、ティーチペンダントなどのシステムの電源がオンになります。
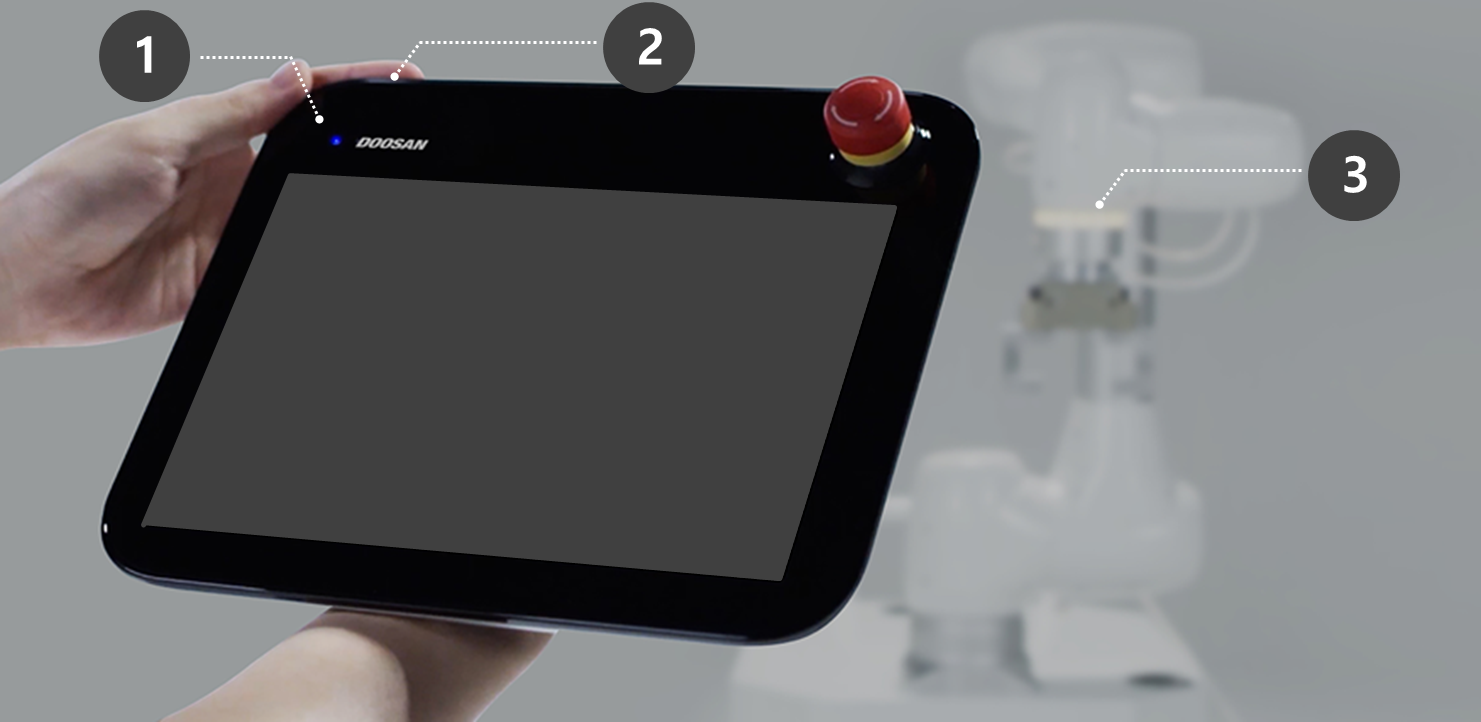
ティーチペンダント画面に電源が入るま で、電源ボ タン(図2)を押し続けますティーチペンダントLED (図1)とフランジLED (図3)が赤く点滅し、ロボットコントローラがネットワークに接続されます。
ㅤ
ㅤ
ティーチペンダント以外の装置の詳細については、「 システム電源のオン/オフ」を参照してください。
注記
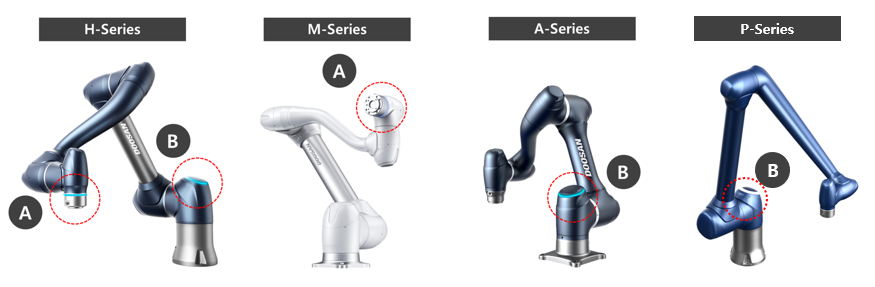
各Doosan RoboticsロボットシリーズのLED位置は次のとおりです。
A:フランジLED
B:軸1 LED
緊急停止ボタンの解除
必須 簡単 1 MIN
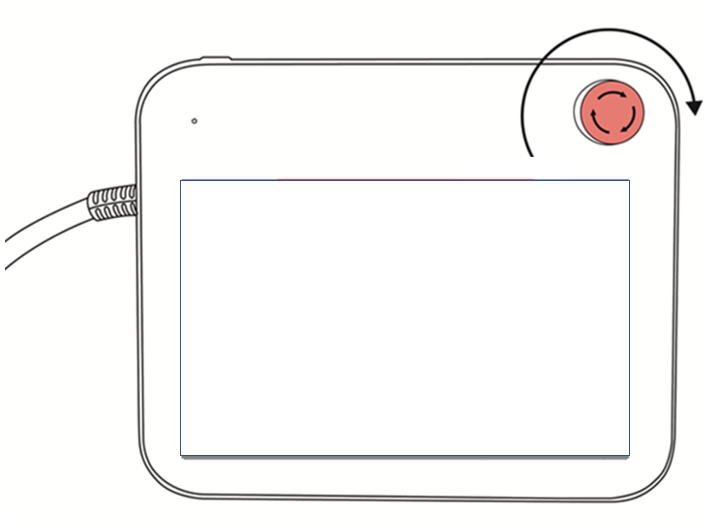
ロボットの設置後、システムの初期起動後、ティーチペンダントの緊急停止ボタンが押されたときに警告ポップアップが表示されます。ロボットを操作するには、緊急停止ボタンを解除する必要があります。
緊急停止ボタンを時計回りに回して、緊急停止状態を解除します。
パッケージのポーズを解除
必須 簡単 3 MIN
ロボットは、輸送や梱包を容易にするために、梱包ポーズになっています。ロボットを使用するには、梱包ポーズを解除する必要があります。ロボットは、パッケージポーズ中にジョイント角度制限を超えるポーズを維持するため、安全制限違反のためにサーボをオンに設定することはできません。この状態では、ロボットLEDが赤色に点灯します。
注記
移動のためにロボットをパッケージ化する必要がある場合は、パッケージモードでパッケージ化ポーズと一緒に移動を使用してパッケージポーズを設定します。
項目 | 説明 | |
|---|---|---|
| 1 | モデル名 | 接続されたロボットモデルの名前が表示されます。 |
| 2 | パック/アンパック | パックまたはアンパックのいずれかを選択できます。 |
| 3 | パッケージングポーズ/ジョイント制限 | ポーズとジョイントの制限値が表示されます。 |
| 4 | 速度比 | パックモードまたはアンパックモードの速度は、スライダまたは入力を使用して調整できます。 |
パッケージングポーズの設定プロセスは次のとおりです。
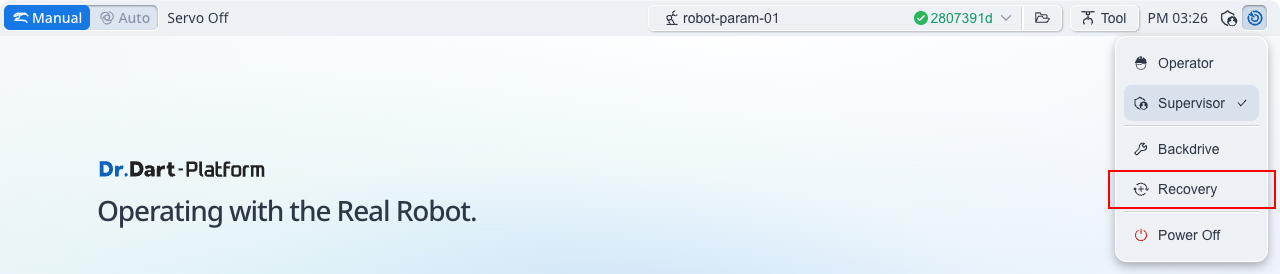
ヘッダーペインの[リカバリ]メニューをタップします。
パッケージングモード タブを選択します。

[Servo On](サーボオン) ボタンをタップして、パッケージングモードを有効にします。

ロボットは自動的に設定されたパッケージングポーズに移動します。
[パック(Pack)] ボタンを使用すると、ロボットを[パック(Pack)]位置に配置でき、[パック 解除(Unpack)] ボタンを使用すると、ロボットをデフォルトの[ホーム位置(Home Position)]に配置できます。
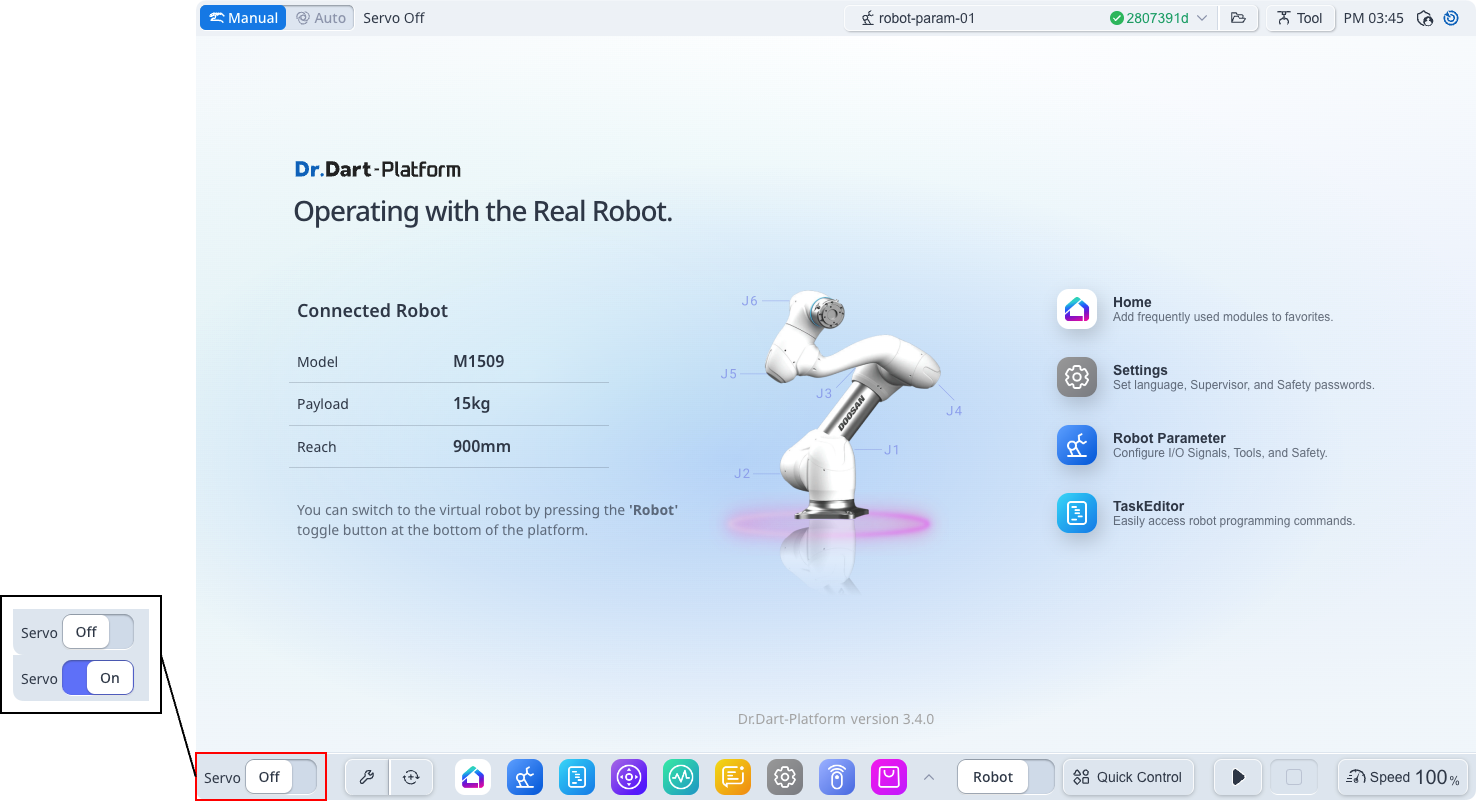
サーボオフ
必須 簡単 1 MIN
サーボオンの状態は、ロボットの姿勢を変更するためにロボットジョイントに電源が供給されている状態です。
サーボオフボタンを押して、ロボットジョイントに供給される電力を遮断し、ロボットを停止します。詳細については' のサーボの概要を参照してください