
ソフトウェアリカバリモードの使用
ソフトウェアリカバリモード
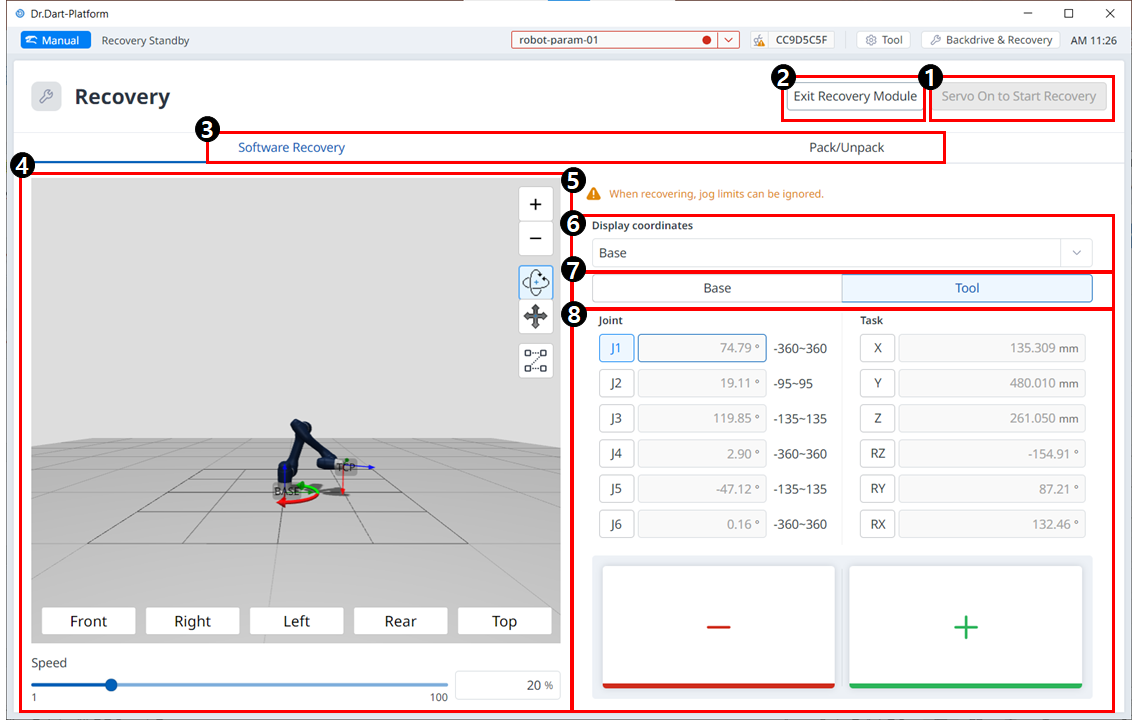
メニュー項目
| 項目 | 説明 | |
|---|---|---|
| 1 | リカバリを開始するためのサーボオン | これは、リカバリモードに入る前にサーボを有効にするためのボタンです。 |
| 2 | リカバリの終了 | このボタンを使用すると、リカバリモジュールを終了できます。 |
| 3 | ヘッダー | このセクションでは、ソフトウェアリカバリモードまたはパック/アンパックモードのいずれかを選択できます。 |
| 4 | 3Dシミュレーション | この領域では、設定値の3Dシミュレーションをプレビューできます。 |
| 5 | 警告メッセージ | ここでは、注意事項について説明します。 |
| 6 | 座標を表示 | ここでは、BaseまたはWorldに基づいて座標を設定できます。 |
| 7 | ベース/ツールボタン | ここでは、ベースまたはツールに基づいて値を設定できます。 |
| 8 | ジョイント/タスク | このセクションでは、ロボットを移動させるために必要な値を入力できます。 |
ソフトウェアリカバリモードを使用するには、次の手順を実行します。
- [Main Menu](メインメニュー)ウィンドウの[Recovery](リカバリ)メニューをタップ [ソフトウェアの回復]画面が[回復]ウィンドウに自動的に表示されます。
Software Recovery画面の右側にある各ジョイントボタンをタップし、
- コックピットのボタンの定義については、 コックピット 」を参照してください。
- 設定に加えた変更は、リアルタイムで左側のシミュレーションウィンドウに反映されます。
- 設定が完了したら 、左上のXボタンをタップしてウィンドウを閉じます。
注意
ジョイント角度制限が3度を超えると、ソフトウェアリペアモードは使用できません。