
Installazione (CS-12P)
Precauzioni durante l'installazione
Attenzione
- Verificare di disporre di uno spazio sufficiente prima di procedere all'installazione della centralina di comando. Se non è possibile mettere in sicurezza uno spazio sufficiente, la centralina di comando potrebbe subire danni o il cavo del manipulador o della console portatile potrebbe avere un cortocircuito.
- Verificare l'alimentazione in ingresso quando si collega l'alimentazione elettrica al prodotto. Se l'alimentazione elettrica collegata è differente da quella nominale (22-60 V c.c.), il prodotto potrebbe non funzionare correttamente o la centralina di comando subire danni.
Ambiente di installazione
Durante l'installazione della centralina di comando, tenere presente quanto segue.
- Verificare di disporre di uno spazio sufficiente prima di procedere all'installazione della centralina di comando.
- La centralina di comando deve essere fissata.
- Verificare che non vi siano componenti non fissati sull'attrezzatura mobile di trasporto.
Installazione hardware
Installare il robot, la centralina di comando e la console portatile, i componenti principali del sistema e collegarli all'alimentazione elettrica prima di azionare il manipulador. L'installazione di ciascun componente è la seguente:
Collegamento del manipolatore e della centralina di comando
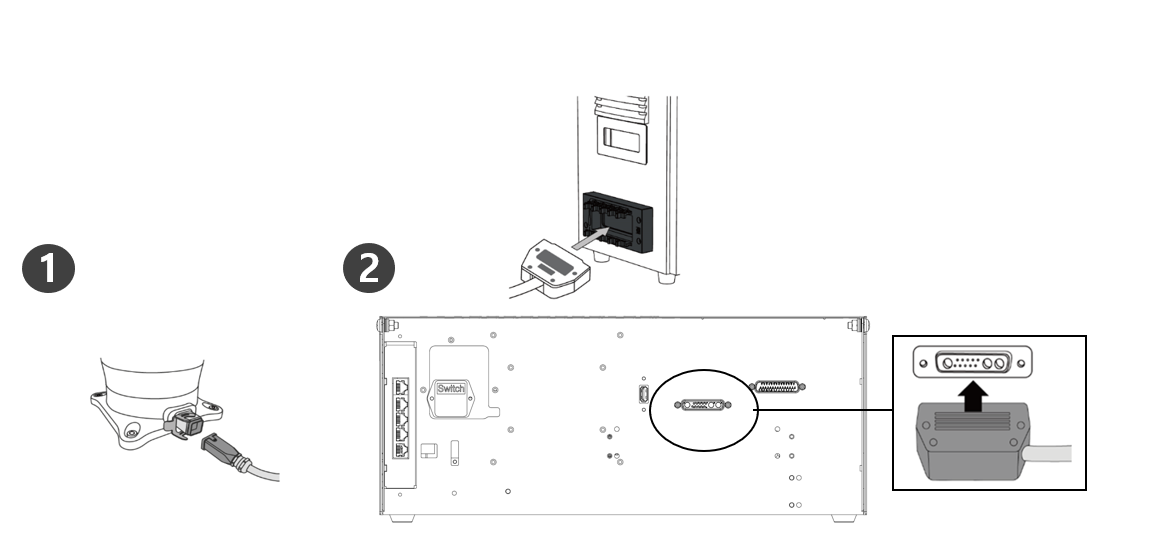
| 1 | Collegare il cavo del manipolatore al controller, posizionare un anello di sicurezza
|
| 2 | Collegare l'estremità opposta del cavo del manipolatore al connettore del controller
|
Attenzione
- Non scollegare il cavo del robot mentre questo è in funzione. Questo potrebbe danneggiare il robot.
- Non modificare o prolungare il cavo del robot.
- Quando la centralina di comando viene installata sull'attrezzatura mobile di trasporto, lasciare uno spazio libero di almeno 50 mm su ciascun lato per consentire la ventilazione.
- Prima di accendere la centralina di comando, assicurarsi che i connettori siano correttamente collegati.
Nota
- Durante la configurazione del sistema, si consiglia di installare un riduttore di rumore per evitare gli effetti provocati dalla rumorosità tra i dispositivi e il malfunzionamento del sistema.
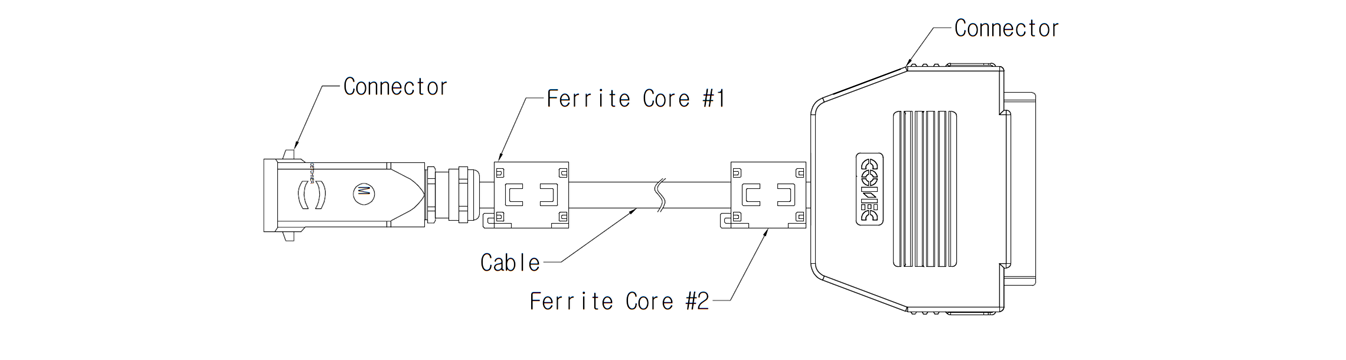
- Se la centralina di comando è influenzata dal rumore generato dalle onde elettromagnetiche, è necessario installare un nucleo di ferrite per garantire il normale funzionamento. La configurazione di installazione è la seguente:
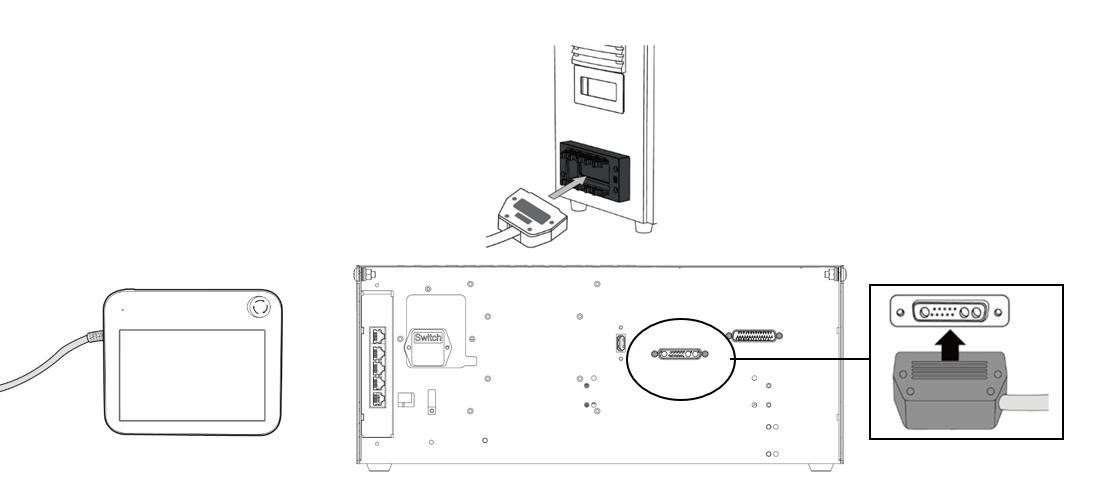
Collegamento della centralina di comando e della console portatile
Inserire il cavo della console portatile nel connettore della centralina di comando corrispondente fino ad udire uno scatto per evitare che il cavo si allenti.
Attenzione
- Verificare che i piedini dell'estremità del cavo non siano danneggiati o piegati prima di procedere al collegamento del cavo stesso.
- Se la console portatile viene utilizzata appendendola sulla attrezzatura mobile di trasporto o sulla centralina di comando, prestare attenzione a non inciampare sui cavi di collegamento.
- Fare attenzione a non lasciare che la centralina di comando, la console portatile o i cavi entrino in contatto con acqua.
- Non installare la centralina di comando e la console portatile in un ambiente umido o polveroso.
- La centralina di comando e la console portatile non devono essere esposte ad ambienti polverosi. Fare particolarmente attenzione in ambienti con presenza di polveri conduttive.
Nota
- Durante la configurazione del sistema, si consiglia di installare un riduttore di rumore per evitare gli effetti provocati dal rumore e il malfunzionamento del sistema.
- Se la console portatile è influenzata dal rumore generato dalle onde elettromagnetiche, è necessario installare un nucleo di ferrite per garantire il normale funzionamento. La configurazione di installazione è la seguente:

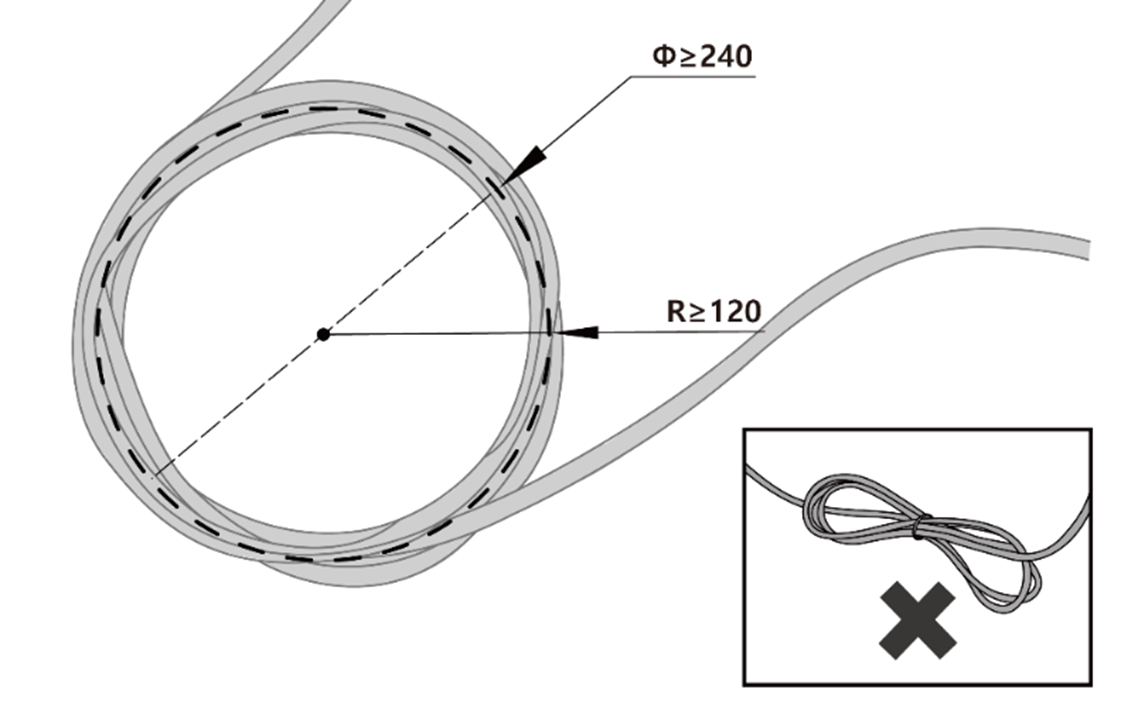
Posa del cavo del robot e del cavo della console portatile
Verificare che il raggio di curvatura del cavo del robot e della console portatile sia superiore a quello minimo prescritto (120 mm).
Nota
- Verificare che il raggio di curvatura del cavo della console portatile sia superiore a quello minimo prescritto (120 mm).
- Se il raggio di curvatura è minore di quello minimo previsto (120 mm), è possibile che si verifichino il distacco del cavo o danneggiamenti del prodotto.
- In ambienti esposti al rumore generato da onde elettromagnetiche, installare il cavo adatto e adottare opportuni accorgimenti per evitare malfunzionamenti.
Alimentazione elettrica alla centralina di comando
Inserire il cavo di alimentazione nel connettore della centralina di comando corrispondente fino ad udire uno scatto per evitare che il cavo si allenti.
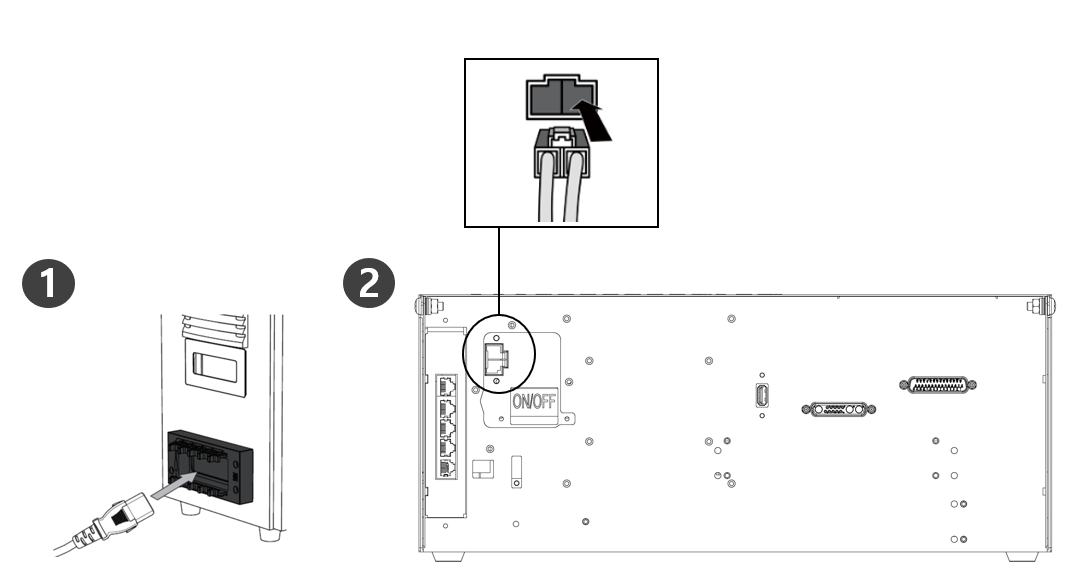
Avvertimento
- Dopo aver collegato il cavo di alimentazione, verificare che il robot sia stato correttamente collegato a terra (collegamento di terra elettronico). Predisporre una terra comune per tutte le apparecchiature del sistema tramite un bullone non utilizzato col simbolo di terra all'interno della centralina di comando. Il conduttore di terra deve soddisfare la capacità massima di corrente del sistema.
- Proteggere l'ingresso di alimentazione della centralina di comando con dispositivo come un interruttore differenziale.
- Non modificare o prolungare il cavo del robot. Ciò potrebbe causare un incendio o il guasto della centralina di comando.
- Verificare che tutti i cavi siano bloccati in modo corretto prima di alimentare la centralina di comando. Utilizzare sempre il cavo originale fornito a corredo del prodotto.
- Fare attenzione a non collegare in modo errato la polarità della tensione di ingresso.
Nota
- Quando si configura il sistema, si consiglia di installare un interruttore di alimentazione in grado di disinserire tutte le apparecchiature contemporaneamente.
- Se la centralina di comando è utilizzata per un AGV, il movimento del robot potrebbe subire limitazioni a seconda del carico e del movimento.
- Se la tensione di ingresso è inferiore a 48V, il movimento del robot potrebbe subire limitazioni a seconda del carico e del movimento.
- L'alimentazione elettrica deve soddisfare requisiti minimi come messa a terra e interruttori. Le specifiche elettriche sono le seguenti:
Parametro | Specifiche |
Tensione di ingresso | 22 – 60 VDC |
Corrente di ingresso nominale | 30 A |