
Configurazione del sistema
| No | Nome | Descrizione |
|---|---|---|
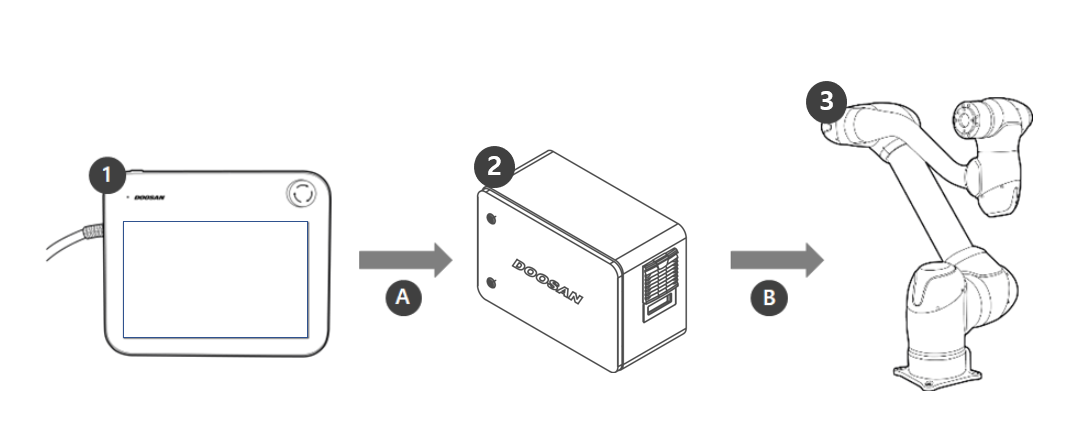
| 1 | Teach pendant | Questo dispositivo gestisce l'intero sistema ed è in grado di insegnare al robot pose specifiche o di effettuare impostazioni relative ai manipolatori e ai controller. |
| 2 | Centralina | Utilizzato per regolare il movimento del robot in base alla posa o al movimento impostato dal teach pendant. È dotato di varie porte i/o che consentono il collegamento e l'uso di vari tipi di apparecchiature e dispositivi. |
| 3 | Manipolatore | Si tratta di un robot collaborativo industriale che può essere utilizzato con una varietà di accessori per utensili per il trasporto di oggetti o l'assemblaggio di parti. |
| A | Comando/monitoraggio | |
| B | Alimentazione/rete |