
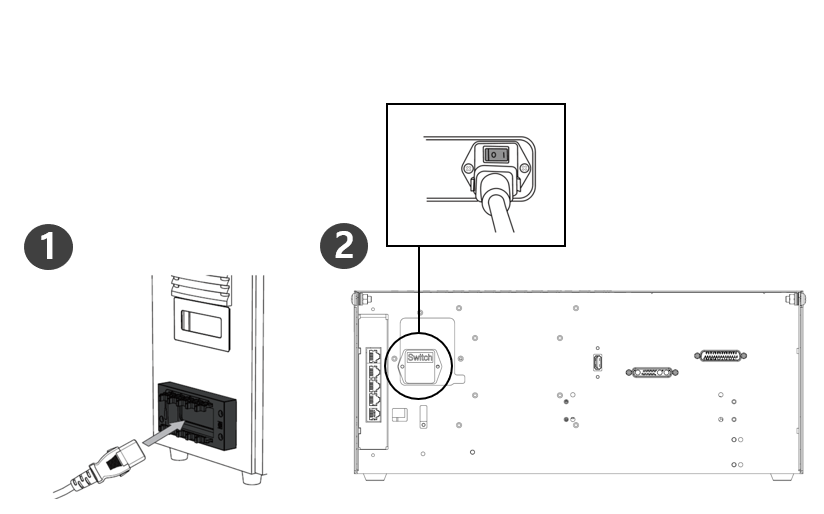
Collegamento dell'alimentazione al controller
Per alimentare il controller, collegare il cavo di alimentazione del controller a una presa di alimentazione IEC standard.
- Durante il collegamento, utilizzare un cavo con una spina di alimentazione standard corrispondente alla presa del paese di utilizzo.
- Spingere completamente la spina nel collegamento corrispondente del controller per evitare che il cavo si allenti. Collegare la spina IEC C14 standard sotto il controller al cavo IEC C13 corrispondente.
Attenzione
- Dopo aver collegato il cavo di alimentazione, accertarsi di mettere a terra correttamente il robot (collegamento a massa elettrica). Stabilire una massa comune per tutte le attrezzature del sistema con bulloni non utilizzati associati al simbolo di messa a terra all'interno della centralina. Il conduttore di terra deve soddisfare la corrente nominale massima del sistema.
- Proteggere la potenza di ingresso del controller utilizzando un interruttore automatico.
- Non apportare modifiche o prolunghe al cavo di alimentazione. Ciò potrebbe causare un incendio o un guasto alla centralina.
- Accertarsi di collegare correttamente tutti i cavi prima di alimentare il controller. Utilizzare sempre il cavo originale incluso nella confezione del prodotto.
Nota
- Durante la configurazione del sistema, si consiglia di installare un interruttore di alimentazione in grado di spegnere tutti i dispositivi contemporaneamente.
L'alimentatore deve soddisfare i requisiti minimi, quali la messa a terra e gli interruttori automatici. Le specifiche elettriche sono le seguenti: (Per le centraline opzionali, fare riferimento alle rispettive appendici.
Parametro | Specifiche |
|---|---|
Tensione di ingresso | DA 100 A 240 V CA |
Fusibile di alimentazione in ingresso (a 100-240V) | 15 A. |
Frequenza di ingresso | Da 47 a 63 Hz |